机器人巡逻
打开第三个终端,开启
move_base节点roslaunch handsfree_2dnav navigation.launch sim:=false map_name:=my_map
初始位置的标定 通过2D Pose Estimate标定初始化位置,直到机器人在地图中的位置和机器人实际的位置一样。
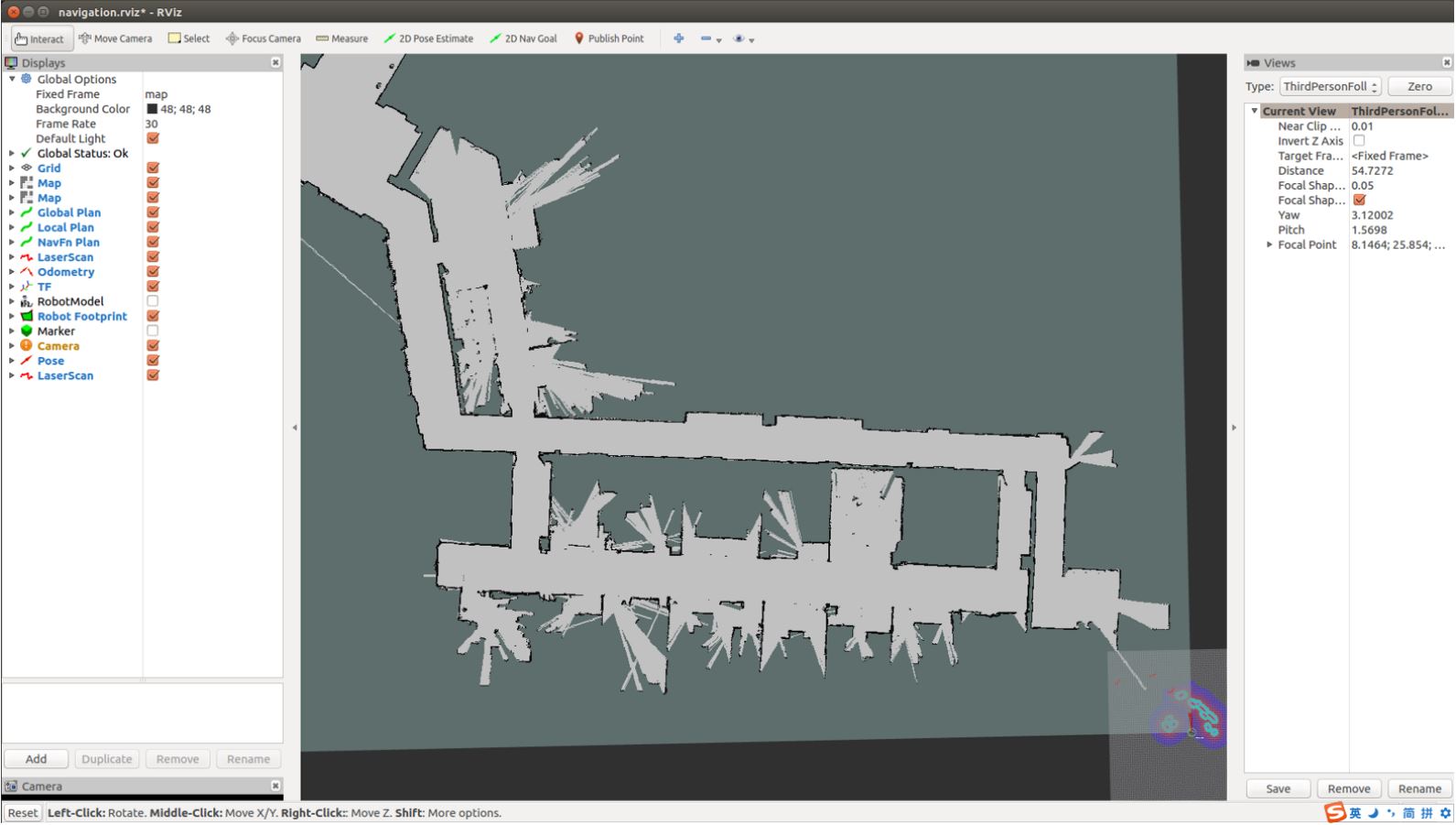
标定初始位置,打开后机器人的初始位置是在图片的右下角,这时我们要通过2D Pose Estimate标定机器人实 际初始化位置,直到机器人在地图中的位置和机器人实际的位置一样,在标定位置过程中我们可以通过附近的 参照物来选取机器人实际的位置。
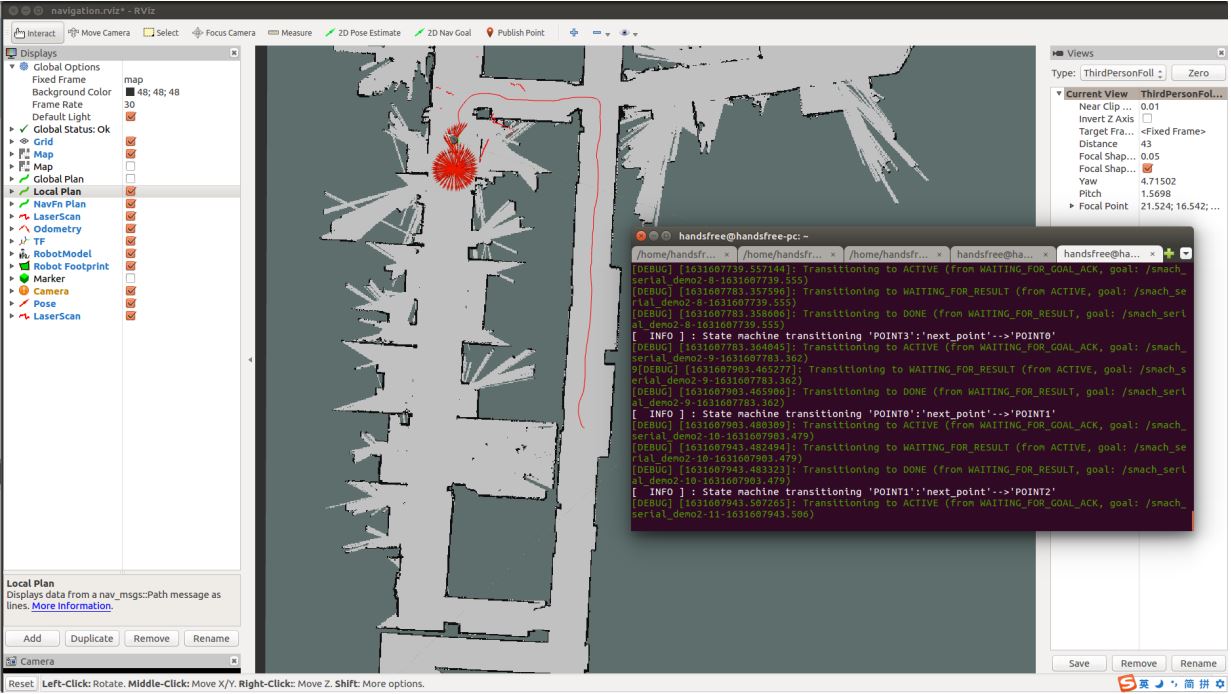
图片标记解释:
a:把√去掉,方便查看标定位置 b:黑色线条是地图上的障碍物 c:红色线条是雷达实际扫描到的障碍物 d:机器人的位置如下图所示,机器人标记后的位置雷达扫描时显示的障碍物与地图上的障碍物重合,说明位置标定相对准确。

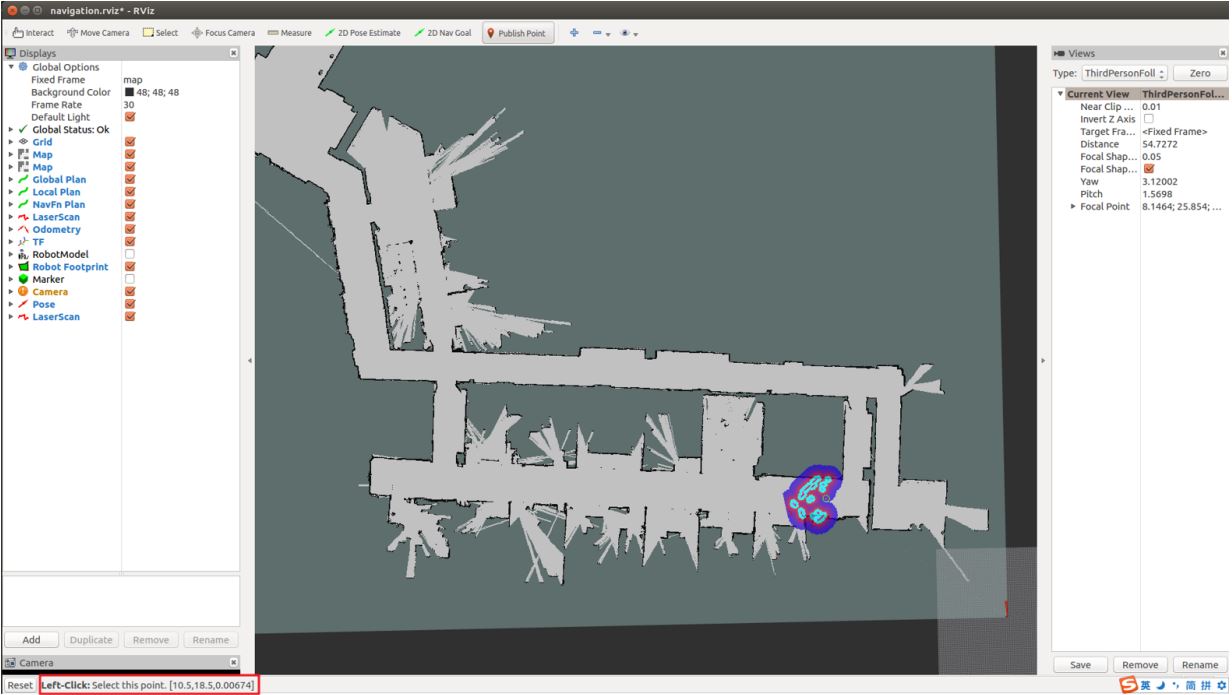
通过 Publish Point 获取目标点的坐标,点击可视化工具上方的 Publish Point ,这时移动鼠标后在可视化工具的 左下方会出现一个坐标,该坐标就是鼠标在地图上的坐标,坐标前面两个数是 x 和 y 的坐标,我们记录 x 和 y 的数就可以,接下来移动鼠标即可,不用点击,并且记录四个目标点的坐标,注意:四个目标点的坐标必须是 在灰色可移动区域内,四个目标点间距离尽量大一点
打开第五个终端,执行下面两条命令,修改python文件
cd gedit handsfree/handsfree_ros_ws/src/handsfree/handsfree_tutorials/script/ 6_application/1_patrol/multi_point_patrol.py需要根据你自己所建的地图来修改点

打开第五个终端,运行python文件
rosrun handsfree_tutorials multi_point_patrol.py