RGBD SLAM v2 experiment
This time we run a classical visual SLAM program:RGBD SlAM V2, this experiment is quite a basic experiment, which can generate a dense 3d point cloud. The camera we use is Xtion2.
Environment configuration
The basic environment is Ubuntu14.04, the ROS version is indigo, which is matched with ubuntu14.04. To download indigo, you can browse github, choose option branch and select indigo. Or you can just run the following scripts in the terminal directly.
//build a workspace
source /opt/ros/indigo/setup.bash
mkdir -p ~/rgbdslam_catkin_ws/src
cd ~/rgbdslam_catkin_ws/src
catkin_init_workspace
cd ~/rgbdslam_catkin_ws/
catkin_make
echo "~/rgbdslam_catkin_ws/devel/setup.bash"
//download code
cd ~/rgbdslam_catkin_ws/src
wget -q http://github.com/felixendres/rgbdslam_v2/archive/indigo.zip
unzip -q indigo.zip
cd ~/rgbdslam_catkin_ws/
//installation
rosdep update
rosdep install rgbdslam
catkin_make
Program test
Input the following command to check whether the rgbdslam is installed successfully or not:
roslaunch rgbdslam rgbdslam.launch
If the program runs successfully, then we can begin the third steps, 3d graph build experiment.
Program running
It is not possible to run the launch files in the roslaunch bag, cause the information of the graph does not match with, also the service of camera does not start, which leads to information-lack for rgbdslam node. So we make some changes in the file and place it in the handsfree_vision file.
roslaunch handsfree_vision rgbdslam_by_xtion.launch
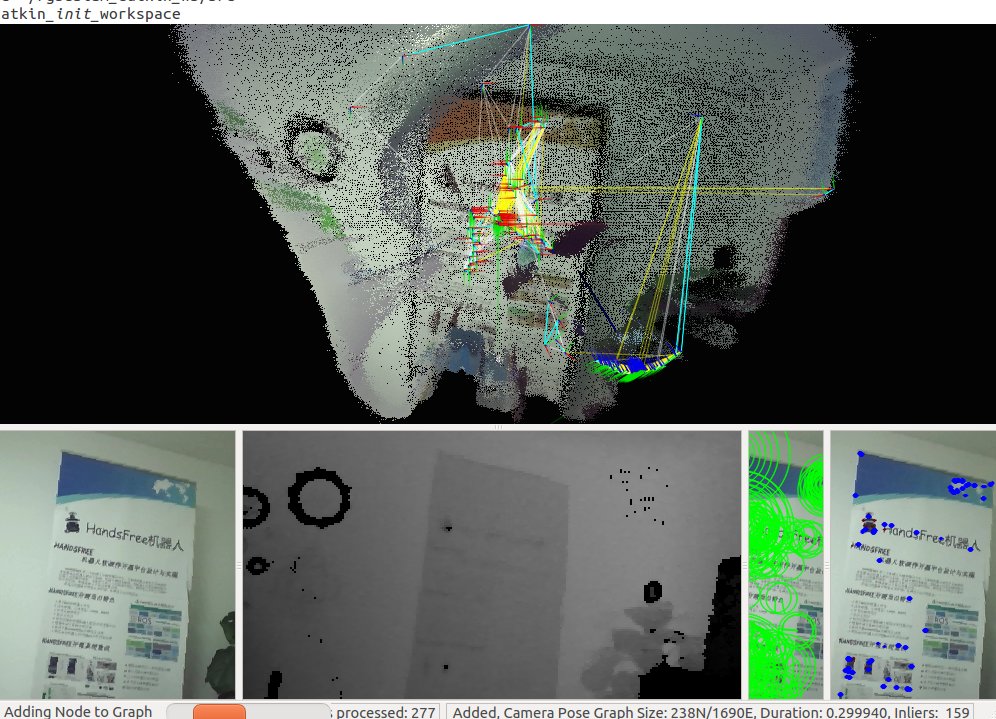 If the result is showed as above, that means the program is run successfully.
The program is resource consumed, your computer may become stuck.
You can press space to pause and check the point cloud, you can also
save the information through the above menu when you use the full screen.
If the result is showed as above, that means the program is run successfully.
The program is resource consumed, your computer may become stuck.
You can press space to pause and check the point cloud, you can also
save the information through the above menu when you use the full screen.