- HandsFree机器人遥控,建图,自主导航综合视频教程。视频地址
雷达建图
本小节介绍使用激光雷达构建二维地图并保存地图到指定目录。构建的地图会用于后面的自主导航实验。
1 准备开始
- 确保机器人已经上电,急停开关打开
- 确保机器人主机安装连接好了激光雷达USB接口和底盘的USB通讯接口。
- 确保前几节教程的实验正常测试通过
- 确保正常关闭前面的教程运行的程序和终端。
2 详细步骤
打开终端,运行机器人底盘控制驱动节点:
roslaunch handsfree_hw handsfree_hw.launch打开新的终端,运行机器人雷达节点驱动节点:
roslaunch handsfree_lidar lidar.launch打开新的终端,运行机器人slam建图节点:
roslaunch handsfree_2dslam slam_gmapping.launch打开新的终端,运行机器人键盘控制节点:
roslaunch handsfree_teleop keyboard_teleop.launch机器人会自动打开底盘控制驱动、雷达节点、键盘控制节点以及rviz地图展示界面
rviz -d ~/handsfree/handsfree_ros_ws/src/handsfree/handsfree_2dslam/rviz/gmapping.rviz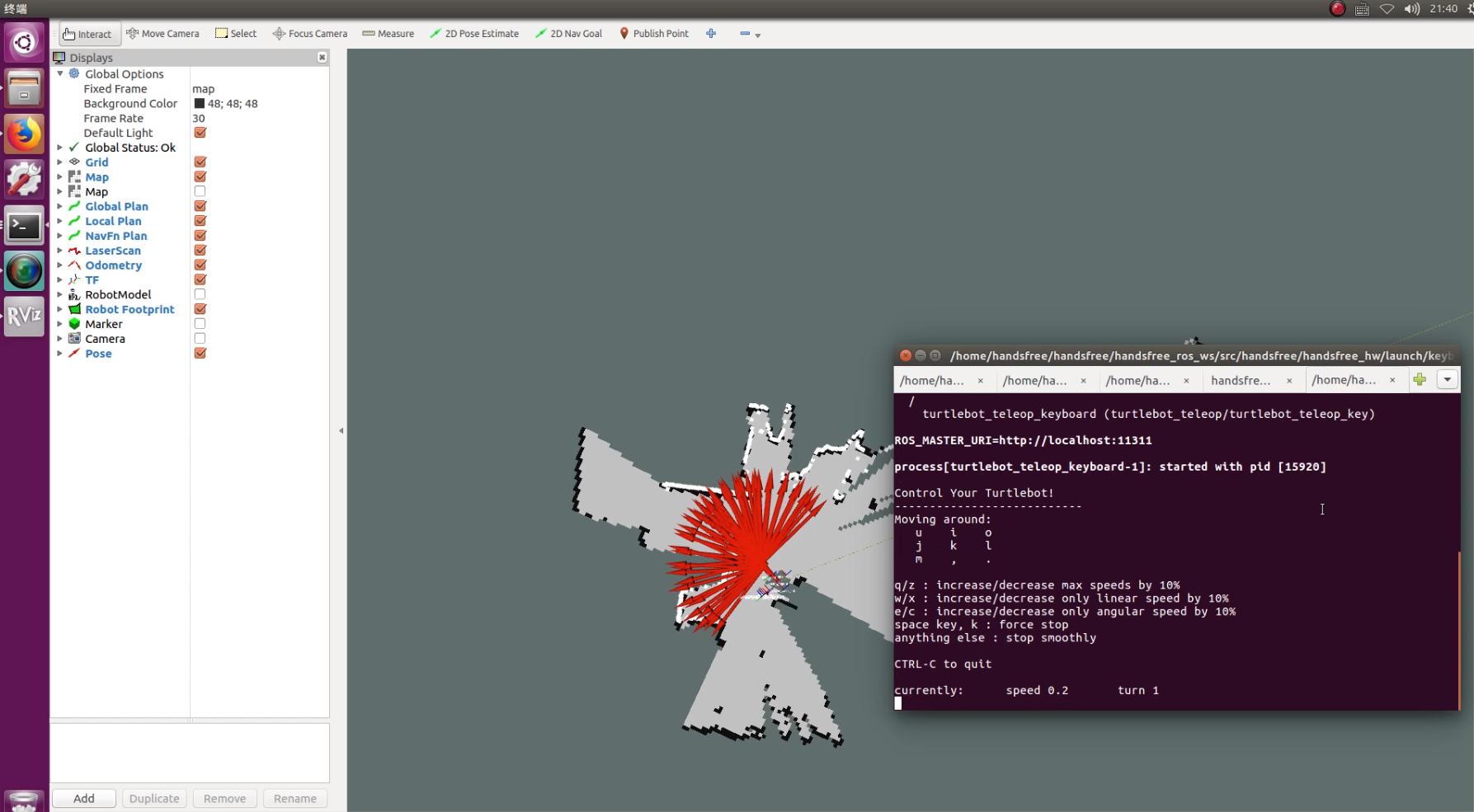
rviz文件也可以手动配置,选择rviz软件界面的file -> open config,手动选择
handsfree/handsfree_bringup/rviz/gmapping.rviz文件作为其配置文件。如果正常的话,可以在RVIZ中看到机器人模型及激光雷达扫描到的可视化数据,然后进行下一步打开键盘遥控节点建图。利用键盘遥控机器人缓慢移动,RVIZ中显示的地图会逐渐补全,当你构建的地图范围满足需求时,就可以运行相关指令保存地图了。建议初学者建图的面积不要太大,两三百平米以内,先测试一下效果。
打开新终端,运行保存地图指令
先切换到想要保存地图的文件夹(建议保存在handsfree_2dslam/map/中)
roscd handsfree_2dslam/map/然后运行保存地图的节点:
rosrun map_server map_saver -f my_map-f 后面跟的是地图保存的名字,my_map名字可以按照自己的需求更改
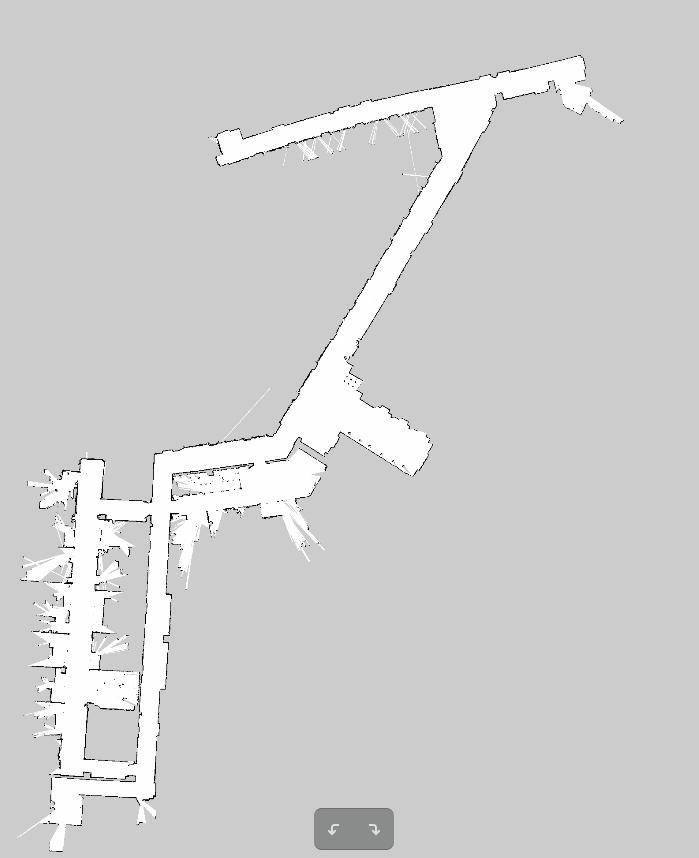
此命令将在handsfree_2dslam/map目录生成.pgm图片文件和.yaml配置文件。到此,建图过程完成。最终生成的地图:
- 以上是分步启动建图的方法,也可以使用一键启动建图的命令启动。首先关闭之前的所有终端,打开一个新的终端,执行命令:
roslaunch handsfree_2dslam slam.launch sim:=false slam_methods:=gmapping
其中,sim是选择仿真建图还是实机建图的参数,slam_methods是可以选择建图的方式,我们支持四种建图方法:gmapping, cartographer, hector, karto。