QR code recognition
1 Ready to start
Before performing QR code recognition, we need to make some preparations.
Print the QR code, the QR code is placed in the /handsfree_ros_ws/src/handsfree/handsfree_ar_tags/config directory
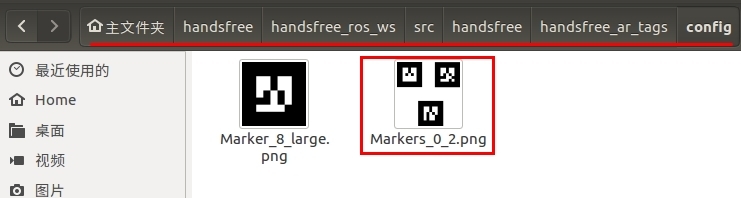
Tips: Due to the algorithm here, if you open the QR code on your phone for recognition, it will be difficult for the camera to recognize it!
Make sure the camera can work normally, according to rgbd_camera in Drive Test Test completes this step. (If the test has been completed before, please ignore this step)
Note: To close a terminal with a process running, use Ctrl+C in the window to interrupt the program, and then close the window.
2 Concise steps
You only need to open two terminals and enter the following two commands respectively
roslaunch handsfree_camera view_camera.launch
roslaunch hands free_ar_tags ar_indiv_rgb_camera.launch
Then shake the paper with the QR code in front of the camera (don't shake it too fast!)
Tips: roslaunch handsfree_camera view_camera.launch can also be replaced by roslaunch handsfree_camera camera.launch. The former will automatically open the RViz visualization interface, and the latter will not open the visualization interface, but you can use other visualization interfaces according to your personal preference.
3 Recognize the QR code
Open the terminal (Ctrl+Alt+T), run the camera driver node and open the visual interface
roslaunch handsfree_camera view_camera.launchThis command runs the driver node of the camera and opens the RViz visualization interface. If you only need to run the driver node of the camera, you can replace the above command
roslaunch handsfree_camera view_camera.launchwithroslaunch handsfree_camera camera.launch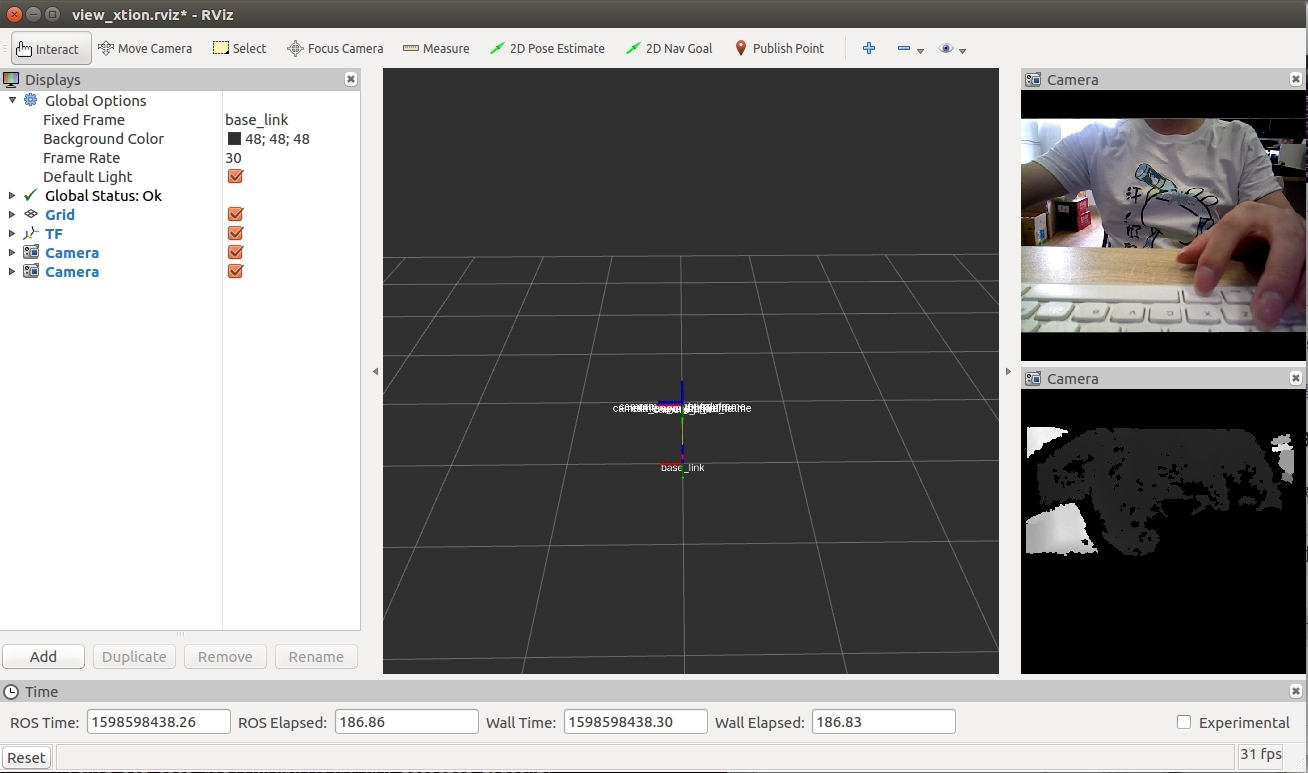
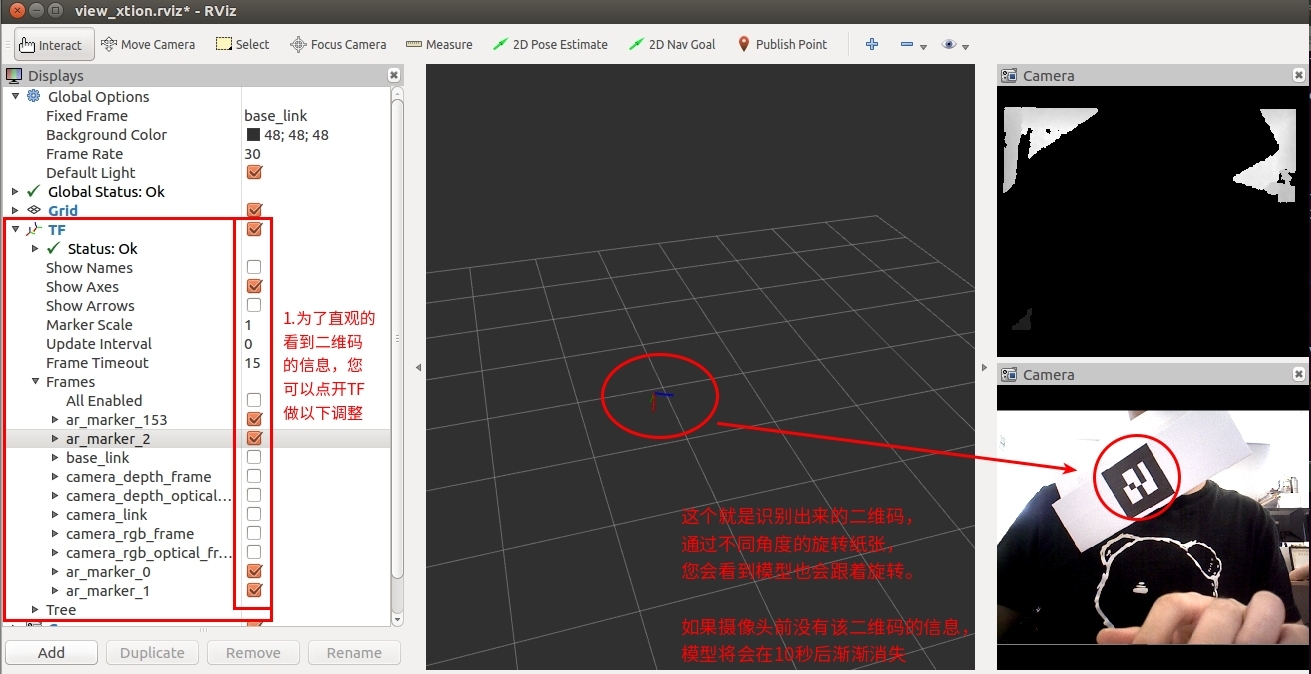
If your RViz visual interface does not have windows for these two cameras, you need to add them manually. Click the
Addbutton in the lower left corner to add, a small window will pop up, selectCamerainside, and then clickok. will be added successfully.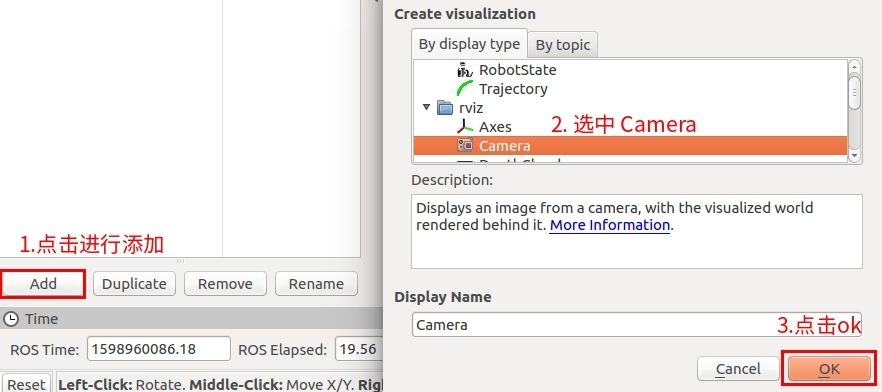
After the addition is successful, you need to make settings to make the Camera box display images. Find the Camera in the sidebar and click to expand it. Remove the check from the Visiblity check box and set the image topic of the Image Topic. Generally, we choose /camera/ rgb/image_raw and /camera/depth/image_raw
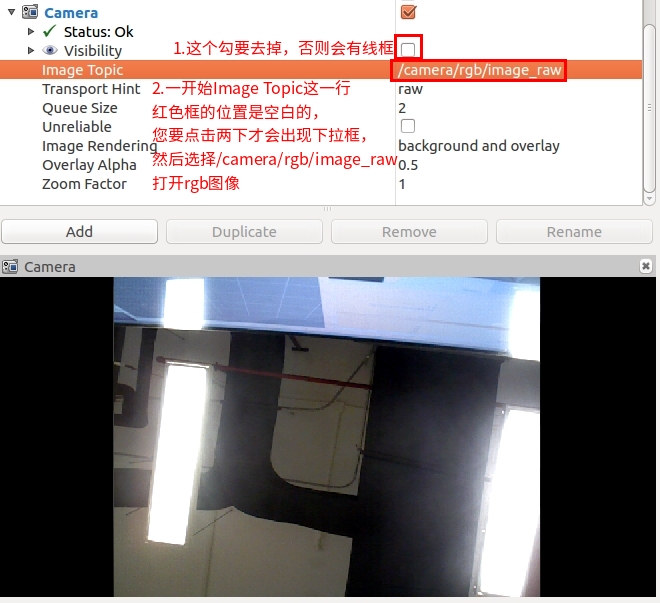
If the added Camera component cannot display the screen, change to the Image component to do the same operation.
Start the QR code recognition node
Open a new terminal, we choose to use RGB image data for QR code recognition, enter the following command
roslaunch hands free_ar_tags ar_indiv_rgb_camera.launchNormally, it will display:
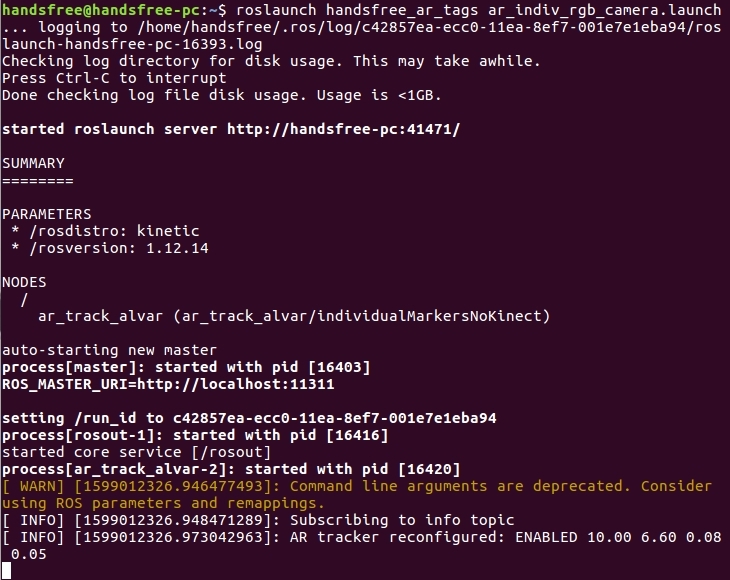
Or choose to use depth image data for QR code recognition, the command is as follows
roslaunch hands free_ar_tags ar_indiv_depth_camera.launchTips: You can choose one of the above two commands. They both use the open source QR code recognition library
ar_track_alvarto recognize QR codes. The main difference betweenar_indiv_rgb_camera.launchandar_indiv_depth_camera.launchfiles is subscription The topic is different, for more information, please refer to the WIKI ofar_track_alvar.View QR code information
We can see the QR code information on the previously opened RViz visualization interface
Or open a new terminal and use the
rostopic echocommand to view the real-time information of the topic/ar_pose_markerof the QR code recognized by the camerarostopic echo /ar_pose_markerThe result of the operation is as shown in the figure below
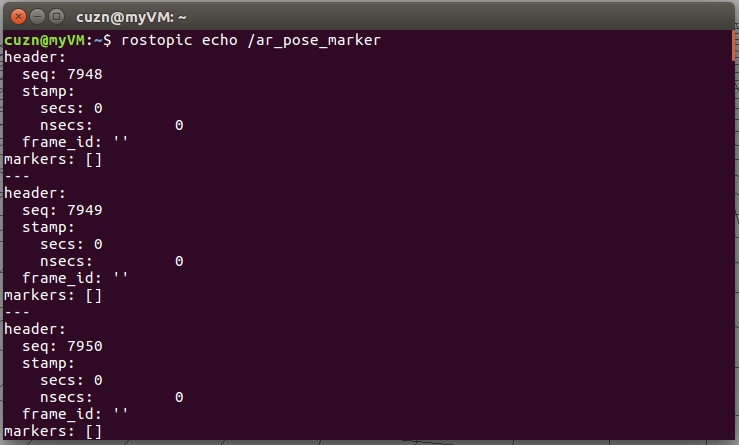
When you move the QR code to the camera, you will see that the information printed in this window has changed
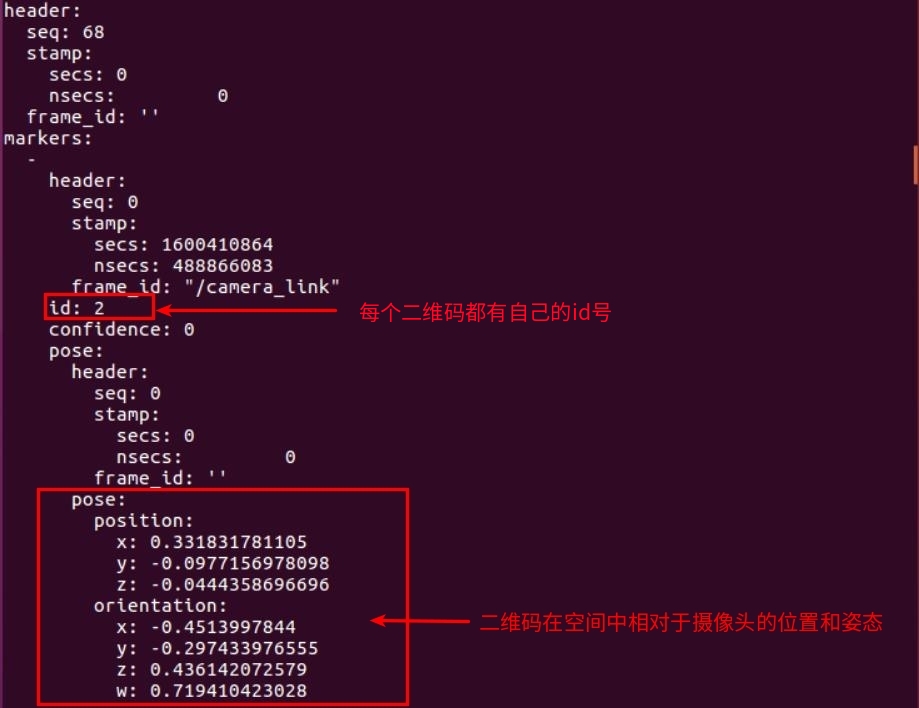
After the camera prints out the topic information of the QR code, you will see the information of
positionandorientation, which means that the robot calculates the position and attitude of the space where the QR code is located through the data obtained by the camera. These data will facilitate the tracking of QR codes by robots.Summary
To recognize the QR code, you need to run two commands on the terminal and open two nodes
- First run the driver node of the camera to ensure that the camera can be turned on and capture image data.
- It is necessary to run the recognition node of the QR code to ensure that the camera can process the image data and recognize the QR code.