HandsFree vs Turtlebot
Parameter Comparison
| Parameter Type | Mini | Stone | Giraffe | Turtlebot2 | Burger | Waffle |
|---|---|---|---|---|---|---|
| Height (mm) | 277 | 1088 | 1465 | 124.8 | 192 | 141 |
| Diameter (mm) | 230 | 400 | 406/446 | 351.5 | 140/180 | 280/306 |
| Weight (kg) | 3 | 10 | 38 | 5 | 1 | 1.8 |
| Load capacity (kg) | 10 | 20 | 70 | 5 | 15 | 30 |
| Maximum speed (m/s) | 1.2 | 1.2 | 1.2 | 0.7 | 0.22 | 0.26 |
| Main control board type | Player-level main control | Professional-level main control (rich interfaces and resources) | Same as left | Kobuki chassis | Game-level main control | Game-level main control |
| Does Power Management Covered | Yes | Yes | Yes | Unknown | No | No |
| Power extension | 12V/3A x 2, USB5V/2A x 2 | 19V/3A x 1,12V/10A x 2,12V/3A x 2, USB5V/2A x 2, one emergency stop 12V/10A | 24V/30A x 2,19V/3A x 1,12V/3A x 2,USB5V/2A x 2,one emergency stop 12V/30A | 12V/5A,12V/1.5A,5V/1A | 3.3V/0.8A 5V/4A 12V /1A | 3.3V/0.8A 5V/4A 12V/1A |
| Supported External Devices | RplidarA1/A2 /A3, Hokuyo Lidar, Xtion1/2, Kinect1/2, Stereo Camera, TK1/2, Raspberry Pi | Mini Supported Devices + Dobot Arm 1/2 | Stone Supported Devices + HandsFree Robot Arm | Refer to the above power port | Refer to the power port above | Refer to the power port above |
| Power supply voltage and capacity | 12v 6000mAh | 12V 30000mAh | 24V 20000mAh | 12v 2200mAh /4400mAh | 12v/1800mAh | 12v/1800mAh |
| Endurance time (h) | 3~6 | 8~12 | 10~15 | ? | 2.5 | 2 |
| Model level | Low-end | Mid-end | High-end | Mid-end | Low-end | Low-end |
| Course System | Yes | Yes | Yes | Yes | Yes | Yes |
| Lower Computer Software | Professional Robot Library OpenRE | Same Left | Same Left | Unknown | OpenCR | Same Left |
| Price (RMB) | 1998/3898/4898/5698 | 9700/14400/15900/16800/18800/28800 | 18000/30000/42000/64000 |
Description:
- Except for the price, other parameters of Turtlebot2 are the parameters of the Kobuki mobile chassis.
- Burger and Waffle are Turtlebot3 series platforms
- Different versions of the format of the price column
- Diameter: length, width
This document is a comparison report between HandsFree robots and Turtlebot robots. The content of the report will be compared from three aspects: hardware, software, and after-sales.
Overview
HandsFree
HandsFree is an open source software and hardware system for robotics research and development. It has a complete and scientific framework, with an excellent embedded system framework as the core, supported by sophisticated circuitry and mechanical design, to help you quickly realize a variety of forms of robotics. The system includes robot navigation, SLAM, computer vision and other modules, and has its own upper layer software and debugging system. She supports other foreign open source projects, such as ROS, MPRT, PIXHAWK, etc., all of which bring you the convenience of development!
HandsFree now mainly promotes three robots, namely Mini, Stone, and Giraffe, which are oriented to different needs. The introduction is as follows: Mini is a small robot with front universal rear dual drive wheel chassis layout. The whole machine adopts a flat truss-type transparent design with a simple and elegant appearance. It can support a variety of lidars, mainstream controllers such as TK1 and Raspberry Pi, and can be equipped with depth cameras such as assustion, Kinect1, and Kinect2. Mini is small in size, powerful in function, and cost-effective. It is very suitable for beginners' development research and multi-machine cluster application research. The effect is shown in the figure below:

Stone is an intelligent robot with front gimbal and rear dual drive wheel chassis layout. Its whole structure adopts flat truss type transparent design, with simple and mechanical aesthetic appearance. stone can be equipped with Dobot1, Dobot m1 and other small robotic arms, and can support a variety of LIDAR, TX1, TK1, Raspberry Pi and other mainstream controllers. It is equipped with a height adjustable two-axis gimbal, compatible with a variety of RGBD cameras and mono and binocular cameras. The effect is shown in the figure below:

Giraffe is an intelligent robot with front gimbal and rear dual drive wheel chassis layout. Giraffe can support one front and one rear LIDAR at the same time, compatible with TX1, TK1, Raspberry Pi and other mainstream controllers, equipped with adjustable height, compatible with a variety of RGBD cameras and mono and binocular cameras with two-axis gimbal. HandsFree medium-sized robotic arm (weight about 15Kg), with up to 65Kg carrying capacity. The effect is shown in the figure below:

Turtlebot
TurtleBot is a low-cost, personal robot kit with open-source software. TurtleBot was created at Willow Garage by Melonee Wise and Tully Foote in November 2010. With TurtleBot, you'll be able to build a robot that can drive around your house, see in 3D, and have enough horsepower to create exciting applications. The TurtleBot kit consists of a mobile base, 2D/3D distance sensor, laptop computer or SBC(Single Board Computer), and the TurtleBot mounting hardware kit. In addition to the TurtleBot kit, users can download the TurtleBot SDK from the ROS wiki . TurtleBot is designed to be easy to buy, build, and assemble, using off the shelf consumer products and parts that easily can be created from standard materials. As an entry level mobile robotics platform, TurtleBot has many of the same capabilities of the company's larger robotics platforms, like PR2.
Here is a brief introduction to the robot, Turtlebot have the second generation and the third generation of robots, these two generations of robots are very different.
Turtlebot2 Stone is a series, most of its robots mainly contain Kobuki mobile chassis, ASUS Xtion depth camera/kinect depth camera, a laptop with Internet access, and various structures to place the laptop and kinect. The main part of the robot is the kobuki mobile chassis, camera and networkable PC. But its second-generation robot mobile chassis is packaged, the internal machinery and software are not open source, leaving only the update firmware interface and some other interfaces. Because it is not open source, we cannot analyze it more, but it is undeniable that this mobile chassis is more stable and accurate. The effect is shown below:

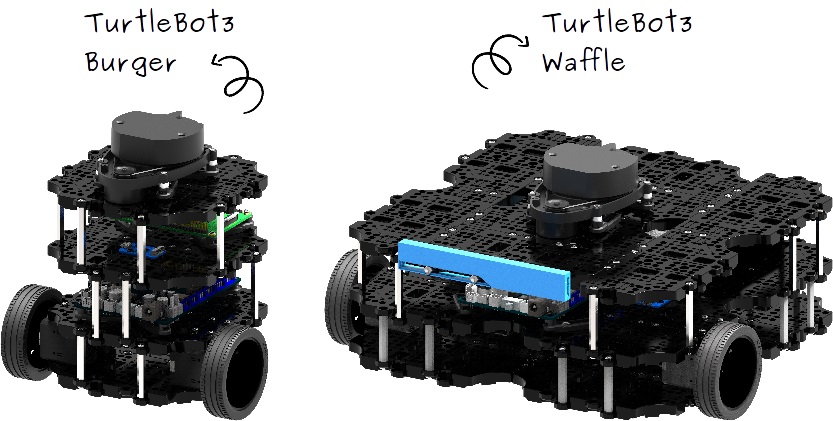
Turtlebot3 is also a series, now the main two is Burger and Waffle. mainly by the Raspberry Pi, an STM32F7 board, and radar composition. Some people try to add depth cameras and robotic arms on it, but it feels like it is only decorative, due to the height limitation, only the radar can play a full role. The third generation of robots and the second generation of robots to compare, the change is very big. (1) more low-cost, the selection of lower-level hardware, a bit for high school students, in the above calculation is not afraid. (2), all open source, the third generation of robot hardware and software are all open source, unlike the second generation, the mobile chassis is an integrated product. The effect is shown below:
Product detailed comparison
Because Turtlebot2 is not open source, we will mention the information of Turtlebot2 when we compare, but we will mainly compare Turtlebot3 and HandsFree for example.
Mechanical
parameter differences
In terms of machinery, HandsFree has three robots, from the small Mini to the large robot Giraffe, with different specifications to meet different needs. In terms of Turtlebot, the second-generation product is similar in size to our medium-sized product Stone, and the third-generation product structure design is not very reasonable. If customers If you do not manually increase the height, the actual effect is similar to that of the Mini. The following is the comparison:
| Parameter Type | Mini | Stone | Giraffe | Turtlebot2 | Burger | Waffle |
|---|---|---|---|---|---|---|
| Height (mm) | 277 | 1088 | 1465 | 124.8 | 192 | 141 |
| Diameter (mm) | 230 | 400 | 406/446 | 351.5 | 140/180 | 280/306 |
| Weight (kg) | 3 | 10 | 38 | 5 | 1 | 1.8 |
| Load capacity (kg) | 10 | 20 | 70 | 5 | 15 | 30 |
| Maximum speed (m/s) | 1.2 | 1.2 | 1.2 | 0.7 | 0.22 | 0.26 |
Description Analysis
In terms of mechanical structure, HandsFree has more advantages.
- Height, you must know that all depth cameras have a blind spot. For example, the effective distance of Xtion2 is 0.8~3.5m, but the height of Turtlebot3 is too low, and there will be a large blind spot. Every robot in HandsFree has an elevated one. The cloud platform has a better view.
- Speed, HandsFree is faster than Turtlebot due to better stability
- In terms of carrying capacity, the difference is not very big, and if you add a robotic arm, it feels that the chassis of the Turtlebot3 is too low. Two of Handsfree can be equipped with a robotic arm, and the location is more suitable.
- PTZ, all Turtlebot series do not have PTZ, and all HandsFree robots can be equipped with PTZ, which can make the field of vision wider.
Main controller
Parameters introduction
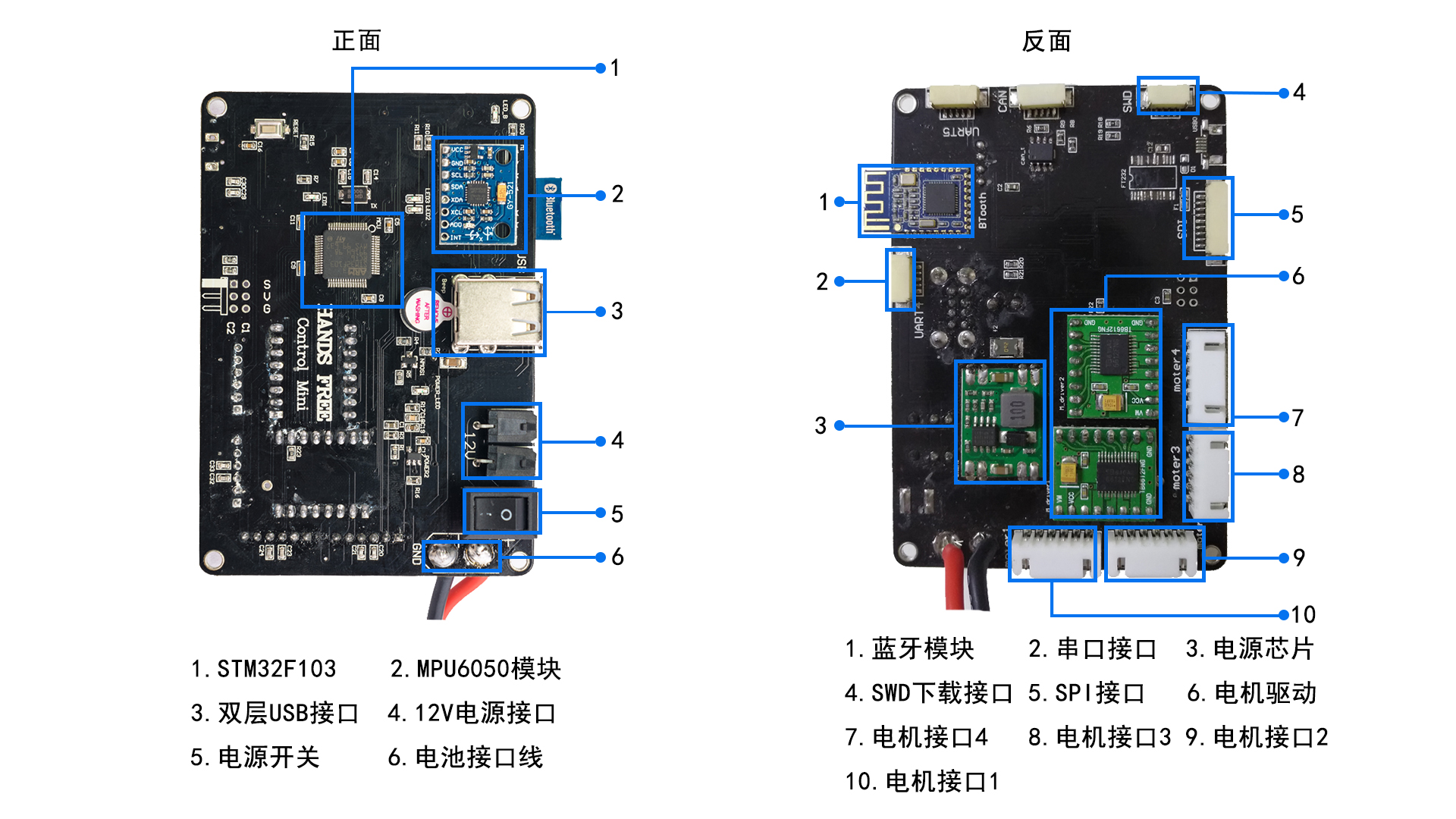
The controller used by the Mini robot in HandsFree is OpenRE Board Mini, the other two use OpenRE Board, These two software and hardware are all open source. The Turtlebot2 chassis control is a black box, which can neither expand the application nor develop it by itself. It is very profitable. After all, people rely on this professionally for food. It will be higher, but there are no parameters, we can't compare, but Turtlebot3 is all open source, we can use it for comparison.
As can be seen from the comparison below, the Turtlebot3 controller also uses a stm32F7. As a whole, the board is still quite low-end, and the interfaces are also various pin headers, which are not suitable for professional robot systems. Compared with OpenRE Board It still looks a lot worse.
Main Features of OpenRE Board:
- 168MHZ STM32F407 Cortex M4
- Onboard triaxial gyroscope, triaxial accelerometer, barometer, triaxial magnetometer.
- 10PWM input and output.
- USBTTL, USB, microSD card.
- Supported models: two-wheel balance car, two-wheel differential mobile platform, three-wheel omnidirectional platform, four-wheel differential platform, four-wheel Mecanum wheel omnidirectional platform, digital servo humanoid, fixed wing, four, six and eight axles Rotorcraft, etc.
See the figure below for details, and more details can be found in link.
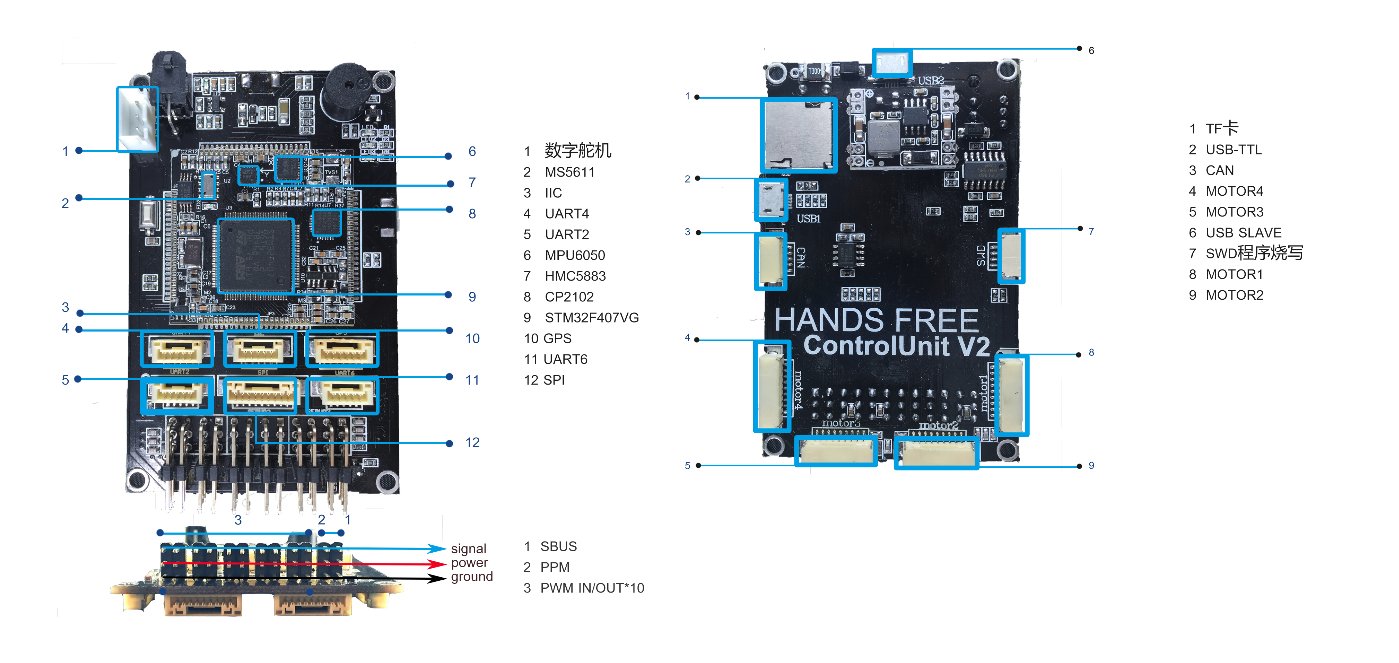
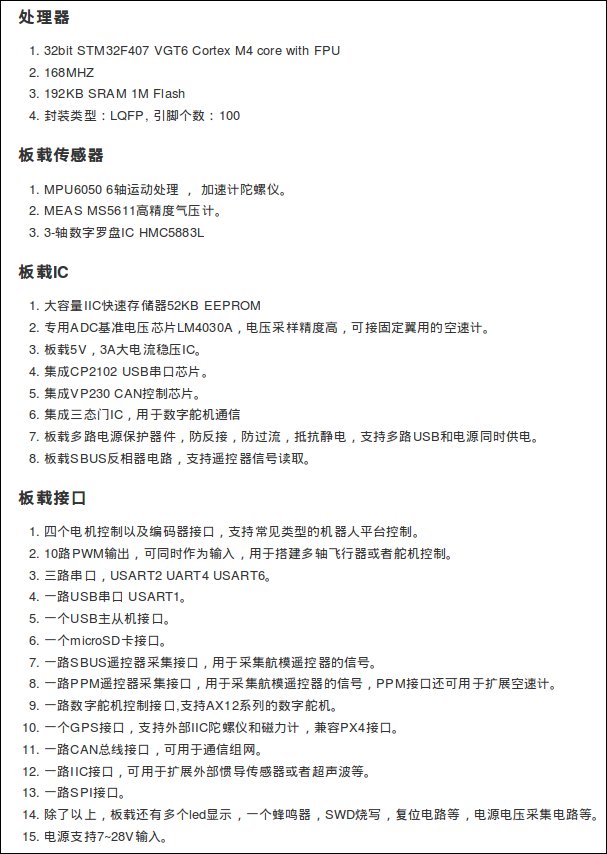
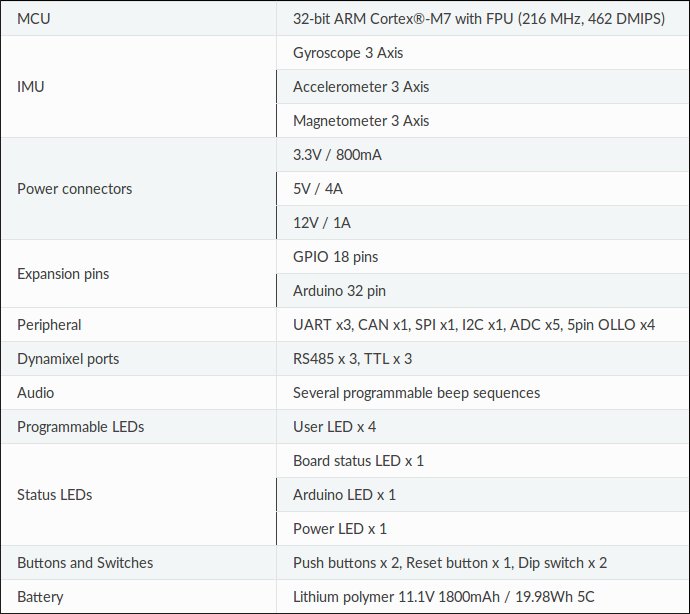
Turtlebot3 uses a development board based on STM32F7. The MCU is good, but the overall resources of the board are too few:
Let me put the parameters of the Mini by the way:
Description Analysis
*The chassis controller of Turtlebot2 may be better than ours, only known is the anti-collision sensor, infrared sensor, anti-drop sensor, 110 degree/s single axis gyroscope.
- The HandsFree controller has abundant on-board resources and plenty of material, which can meet the research needs of common robots. At the same time, at the same time, try to choose stable and reliable interfaces and ICs at all costs. Just a chip for ADC reference voltage costs more than ten yuan. The MOLEX interface is also an expensive self-locking interface. This is mainly because the HandsFree team itself uses this controller for research and development, so many details are considered to meet their own needs. At the same time, the HandsFree team developed the OpenRE embedded robot library for the controller, and users can easily build applications based on this library. Moreover, OpenRE can also fully support development in the linux environment, which greatly facilitates ROS developers and robot developers who do not understand embedded.
- The MCU of Turtlebot3 is relatively high-end, but the resources on the development board are limited, which feels a bit wasted.
Summary: The onboard resources of Turtlebot3 can only be compared slightly with the Mini, and there is no comparison with the onboard resources of the second generation of HandsFree. The parameters of the Kobuki chassis controller are unknown, and the program is not open source, so it cannot be compared. It can only be said that there may be some advantages.
Power supply scheme
Parameters introduction
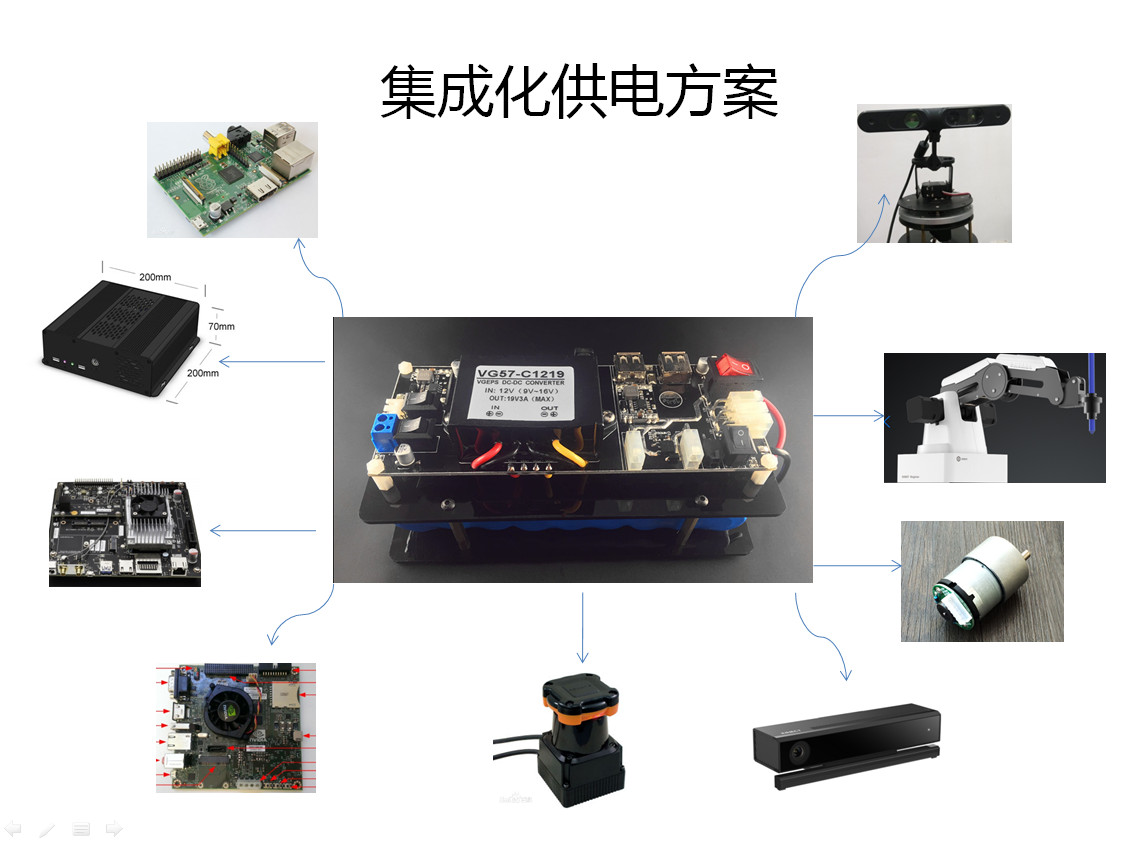
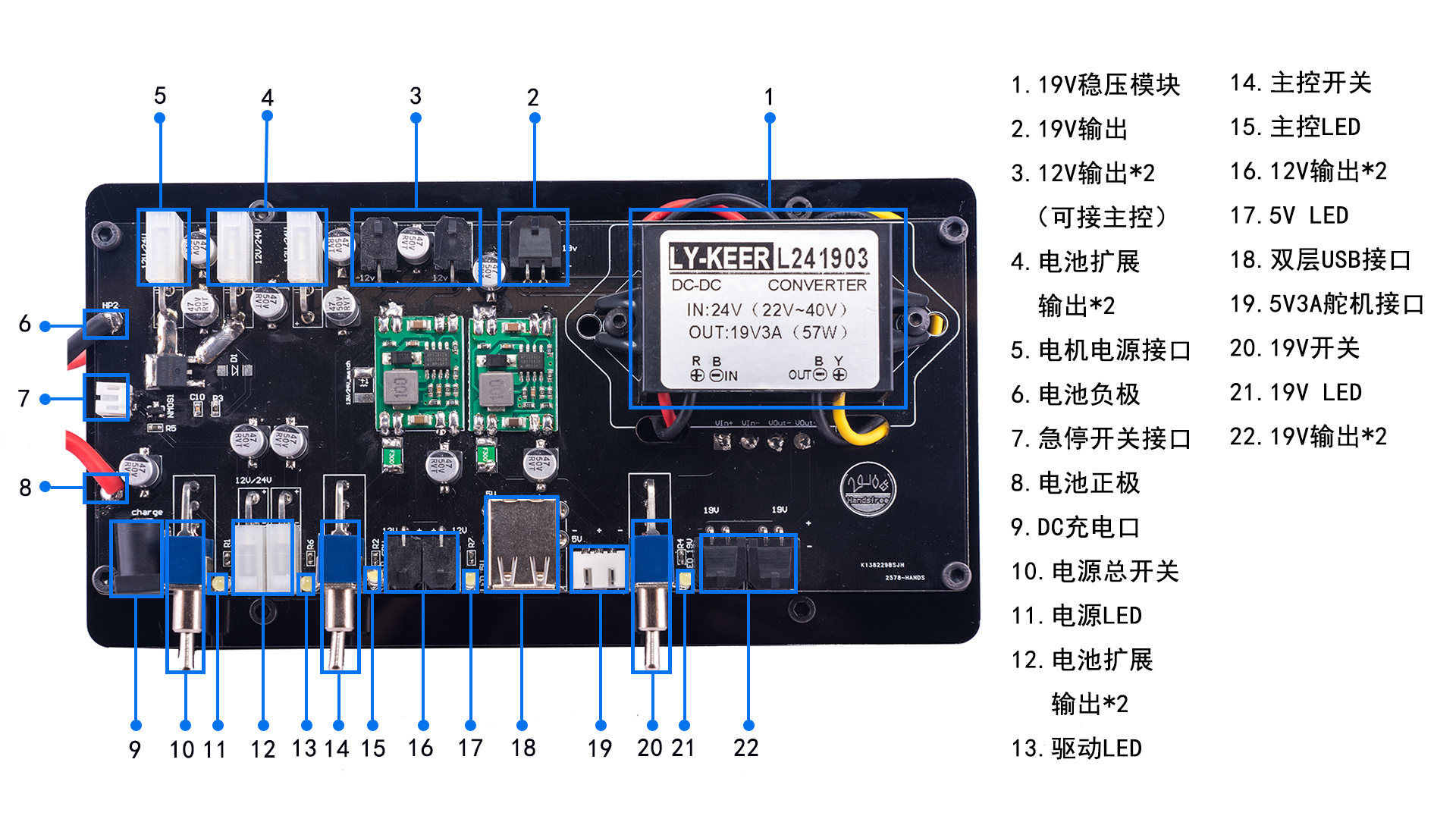
Power Manager is a power distribution board designed by the hardware standard of the HandsFree open source project, with multiple switches and multiple power conversion functions to meet the diverse power needs of robots. It supports the power supply of commonly used TX1, TK1, MiniPC, Raspberry Pi, Kinect, HOKUYOU radar and other devices, and also supports the power supply of the motor drive of the robot, the PTZ servo, the mechanical arm and other structures. It also comes with an emergency stop switch interface and One emergency stop power output. With the large-capacity battery, it can provide an integrated power supply solution for the machine. The HandsFree mobile platform adopts an integrated power supply scheme, which is to simplify the power supply design for robot developers and facilitate developers to develop in various forms. There are a large number of power ports on the power board, providing a variety of different voltages, which can supply power to various forms of equipment. At the same time, we define different voltages represented by different interfaces to ensure that devices and interfaces of different voltages cannot be connected together smoothly, thereby protecting the equipment.
The whole power management system is an advantage of the HandsFree robot, which is not considered by Turtlebot3.
Turtlebot2 mobile chassis has external interface, built-in battery, Turtlebot3 also has external interface. Here's a comparison of the two:
| Parameter Type | Mini | Stone | Giraffe | Turtlebot2 | Burger | Waffle |
|---|---|---|---|---|---|---|
| Does Power Management Covered | Yes | Yes | Yes | Unknown | No | No |
| Power extension | 12V/3A x 2, USB5V/2A x 2 | 19V/3A x 1,12V/10A x 2,12V/3A x 2, USB5V/2A x 2, one emergency stop 12V/10A | 24V/30A x 2,19V/3A x 1,12V/3A x 2,USB5V/2A x 2,one emergency stop 12V/30A | 12V/5A,12V/1.5A,5V/1A | 3.3V/0.8A 5V/4A 12V /1A | 3.3V/0.8A 5V/4A 12V/1A |
| Supported External Devices | RplidarA1/A2 /A3, Hokuyo Lidar, Xtion1/2, Kinect1/2, Stereo Camera, TK1/2, Raspberry Pi | Mini Supported Devices + Dobot Arm 1/2 | Stone Supported Devices + HandsFree Robot Arm | Refer to the above power port | Refer to the power port above | Refer to the power port above |
| Power supply voltage and capacity | 12v 6000mAh | 12V 30000mAh | 24V 20000mAh | 12v 2200mAh /4400mAh | 12v/1800mAh | 12v/1800mAh |
| Endurance time (h) | 3~6 | 8~12 | 10~15 | ? | 2.5 | 2 |
Mechanical
parameter differences
In terms of machinery, HandsFree has three robots, from the small Mini to the large robot Giraffe, with different specifications to meet different needs. In terms of Turtlebot, the second-generation product is similar in size to our medium-sized product Stone, and the third-generation product structure design is not very reasonable. If customers If you do not manually increase the height, the actual effect is similar to that of the Mini. The following is the comparison:
| Parameter Type | Mini | Stone | Giraffe | Turtlebot2 | Burger | Waffle |
|---|---|---|---|---|---|---|
| Height (mm) | 277 | 1088 | 1465 | 124.8 | 192 | 141 |
| Diameter (mm) | 230 | 400 | 406/446 | 351.5 | 140/180 | 280/306 |
| Weight (kg) | 3 | 10 | 38 | 5 | 1 | 1.8 |
| Load capacity (kg) | 10 | 20 | 70 | 5 | 15 | 30 |
| Maximum speed (m/s) | 1.2 | 1.2 | 1.2 | 0.7 | 0.22 | 0.26 |
Description Analysis
In terms of mechanical structure, HandsFree has more advantages.
- Height, you must know that all depth cameras have a blind spot. For example, the effective distance of Xtion2 is 0.8~3.5m, but the height of Turtlebot3 is too low, and there will be a large blind spot. Every robot in HandsFree has an elevated one. The cloud platform has a better view.
- Speed, HandsFree is faster than Turtlebot due to better stability
- In terms of carrying capacity, the difference is not very big, and if you add a robotic arm, it feels that the chassis of the Turtlebot3 is too low. Two of Handsfree can be equipped with a robotic arm, and the location is more suitable.
- PTZ, all Turtlebot series do not have PTZ, and all HandsFree robots can be equipped with PTZ, which can make the field of vision wider.
main controller
Parameters introduction
The controller used by the Mini robot in HandsFree is OpenRE Board Mini, the other two use OpenRE Board, These two software and hardware are all open source. The Turtlebot2 chassis control is a black box, which can neither expand the application nor develop it by itself. It is very profitable. After all, people rely on this professionally for food. It will be higher, but there are no parameters, we can't compare, but Turtlebot3 is all open source, we can use it for comparison.
As can be seen from the comparison below, the Turtlebot3 controller also uses a stm32F7. As a whole, the board is still quite low-end, and the interfaces are also various pin headers, which are not suitable for professional robot systems. Compared with OpenRE Board It still looks a lot worse.
Main Features of OpenRE Board:
- 168MHZ STM32F407 Cortex M4
- Onboard triaxial gyroscope, triaxial accelerometer, barometer, triaxial magnetometer.
- 10PWM input and output.
- USBTTL, USB, microSD card.
- Supported models: two-wheel balance car, two-wheel differential mobile platform, three-wheel omnidirectional platform, four-wheel differential platform, four-wheel Mecanum wheel omnidirectional platform, digital servo humanoid, fixed wing, four, six and eight axles Rotorcraft, etc.
See the figure below for details, and more details can be found in link.
Turtlebot3 uses a development board based on STM32F7. The MCU is good, but the overall resources of the board are too few:
Let me put the parameters of the Mini by the way:
Description Analysis
*The chassis controller of Turtlebot2 may be better than ours, only known is the anti-collision sensor, infrared sensor, anti-drop sensor, 110 degree/s single axis gyroscope.
- The HandsFree controller has abundant on-board resources and plenty of material, which can meet the research needs of common robots. At the same time, at the same time, try to choose stable and reliable interfaces and ICs at all costs. Just a chip for ADC reference voltage costs more than ten yuan. The MOLEX interface is also an expensive self-locking interface. This is mainly because the HandsFree team itself uses this controller for research and development, so many details are considered to meet their own needs. At the same time, the HandsFree team developed the OpenRE embedded robot library for the controller, and users can easily build applications based on this library. Moreover, OpenRE can also fully support development in the linux environment, which greatly facilitates ROS developers and robot developers who do not understand embedded.
- The MCU of Turtlebot3 is relatively high-end, but the resources on the development board are limited, which feels a bit wasted.
Summary: The onboard resources of Turtlebot3 can only be compared slightly with the Mini, and there is no comparison with the onboard resources of the second generation of HandsFree. The parameters of the Kobuki chassis controller are unknown, and the program is not open source, so it cannot be compared. It can only be said that there may be some advantages.
Power supply scheme
Parameters introduction
Power Manager is a power distribution board designed by the hardware standard of the HandsFree open source project, with multiple switches and multiple power conversion functions to meet the diverse power needs of robots. It supports the power supply of commonly used TX1, TK1, MiniPC, Raspberry Pi, Kinect, HOKUYOU radar and other devices, and also supports the power supply of the motor drive of the robot, the PTZ servo, the mechanical arm and other structures. It also comes with an emergency stop switch interface and One emergency stop power output. With the large-capacity battery, it can provide an integrated power supply solution for the machine. The HandsFree mobile platform adopts an integrated power supply scheme, which is to simplify the power supply design for robot developers and facilitate developers to develop in various forms. There are a large number of power ports on the power board, providing a variety of different voltages, which can supply power to various forms of equipment. At the same time, we define different voltages represented by different interfaces to ensure that devices and interfaces of different voltages cannot be connected together smoothly, thereby protecting the equipment.
The whole power management system is an advantage of the HandsFree robot, which is not considered by Turtlebot3.
Turtlebot2 mobile chassis has external interface, built-in battery, Turtlebot3 also has external interface. Here's a comparison of the two:
| Parameter Type | Mini | Stone | Giraffe | Turtlebot2 | Burger | Waffle |
|---|---|---|---|---|---|---|
| Does Power Management Covered | Yes | Yes | Yes | Unknown | No | No |
| Power extension | 12V/3A x 2, USB5V/2A x 2 | 19V/3A x 1,12V/10A x 2,12V/3A x 2, USB5V/2A x 2, one emergency stop 12V/10A | 24V/30A x 2,19V/3A x 1,12V/3A x 2,USB5V/2A x 2,one emergency stop 12V/30A | 12V/5A,12V/1.5A,5V/1A | 3.3V/0.8A 5V/4A 12V /1A | 3.3V/0.8A 5V/4A 12V/1A |
| Supported External Devices | RplidarA1/A2 /A3, Hokuyo Lidar, Xtion1/2, Kinect1/2, Stereo Camera, TK1/2, Raspberry Pi | Mini Supported Devices + Dobot Arm 1/2 | Stone Supported Devices + HandsFree Robot Arm | Refer to the above power port | Refer to the power port above | Refer to the power port above |
| Power supply voltage and capacity | 12v 6000mAh | 12V 30000mAh | 24V 20000mAh | 12v 2200mAh /4400mAh | 12v/1800mAh | 12v/1800mAh |
| Endurance time (h) | 3~6 | 8~12 | 10~15 | ? | 2.5 | 2 |