启动激光雷达
本设备配备了激光雷达,用户可在新终端中使用如下指令启动雷达
roslaunch handsfree_uav_lidar view_lidar.launch
之后可以看到如下输出内容
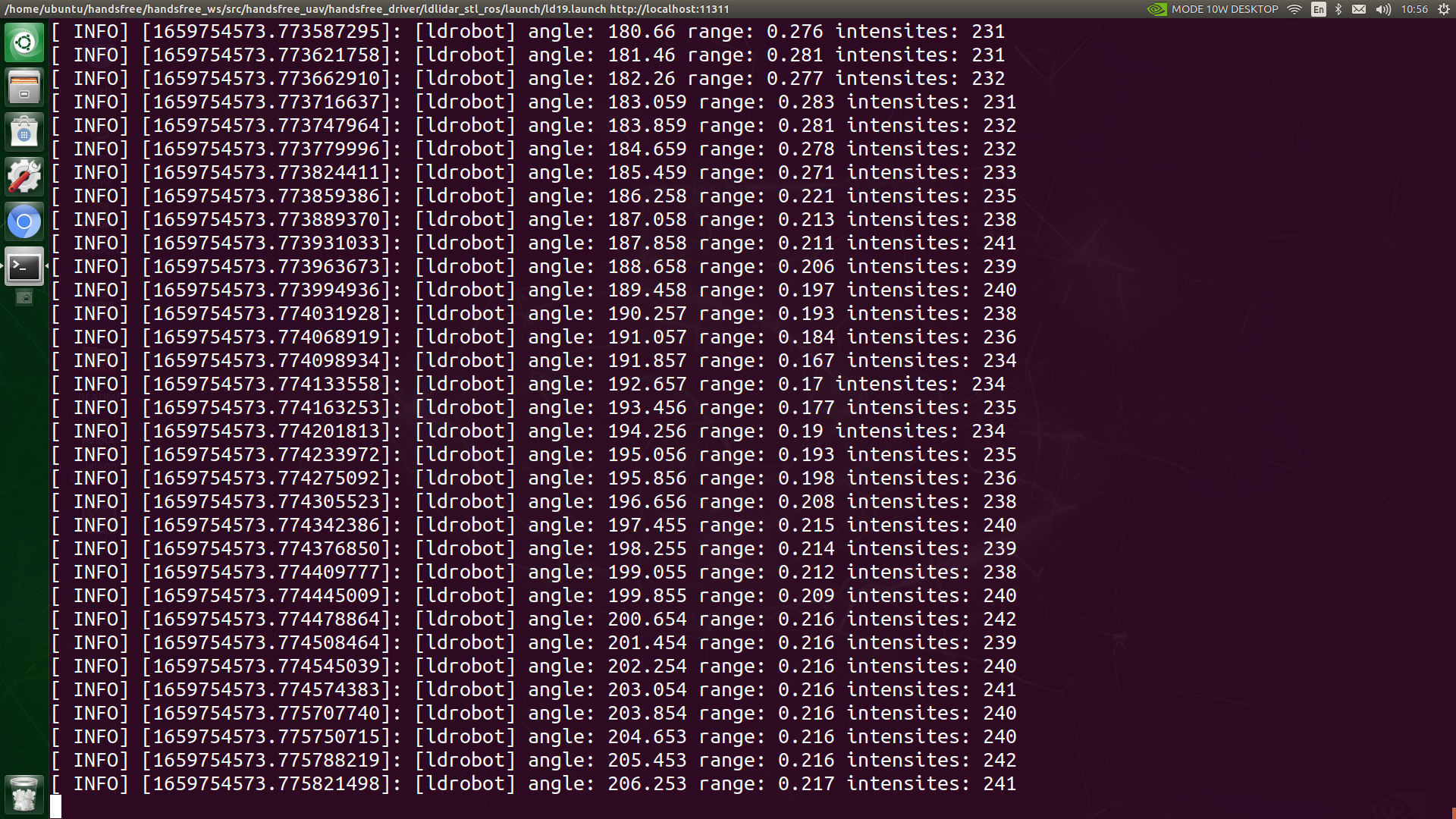
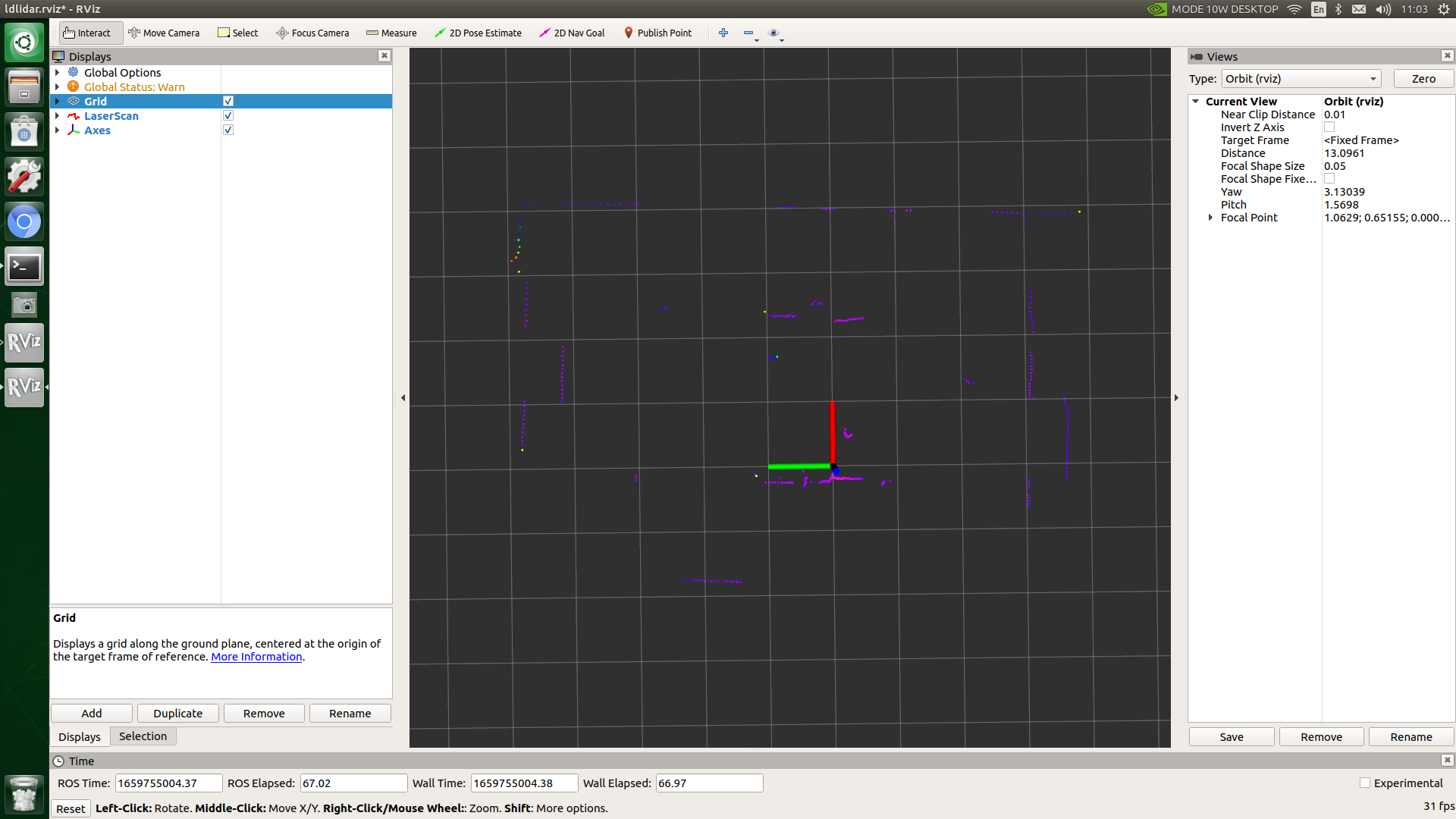
查看雷达实时扫描结果
启动立体实感双目相机
用户可通过两种方式查看realsense深度相机的图像
1.通过英特尔官方软件启动
用户可使用如下指令打开英特尔的官方软件
realsense-viewer
之后可查看realsense深度相机的rgb图像
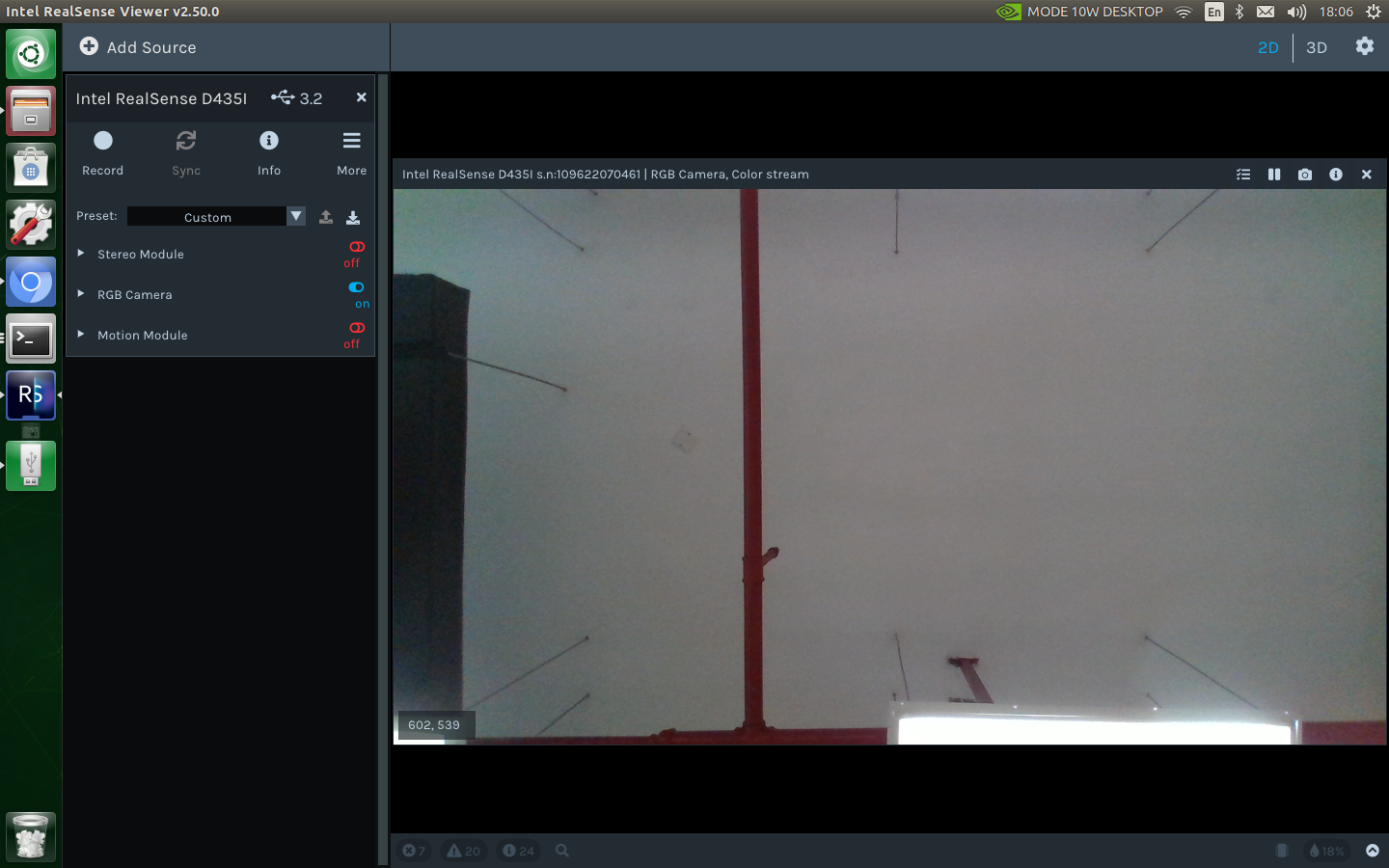
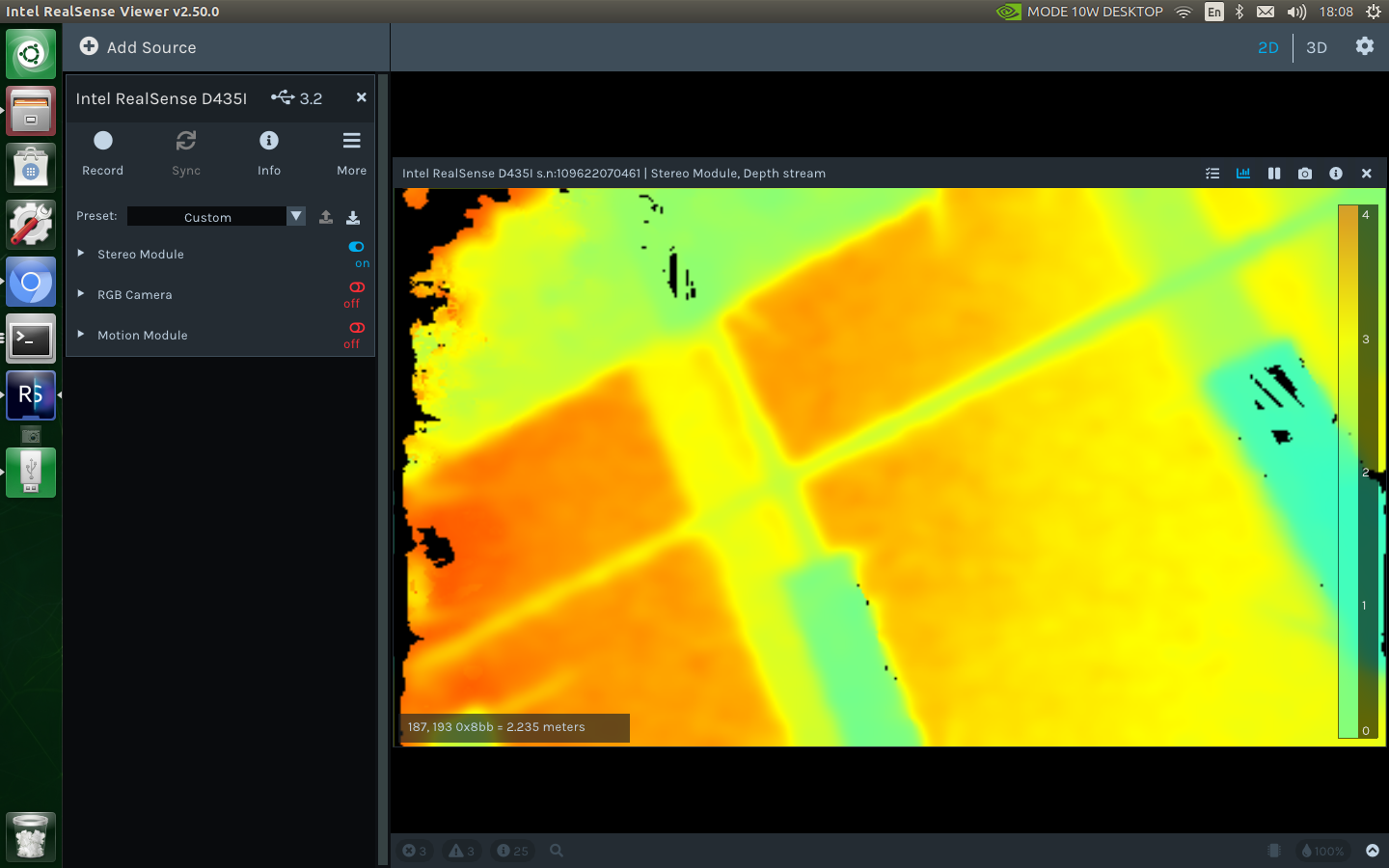
也可查看深度图像
2. 通过 ROS 驱动启动
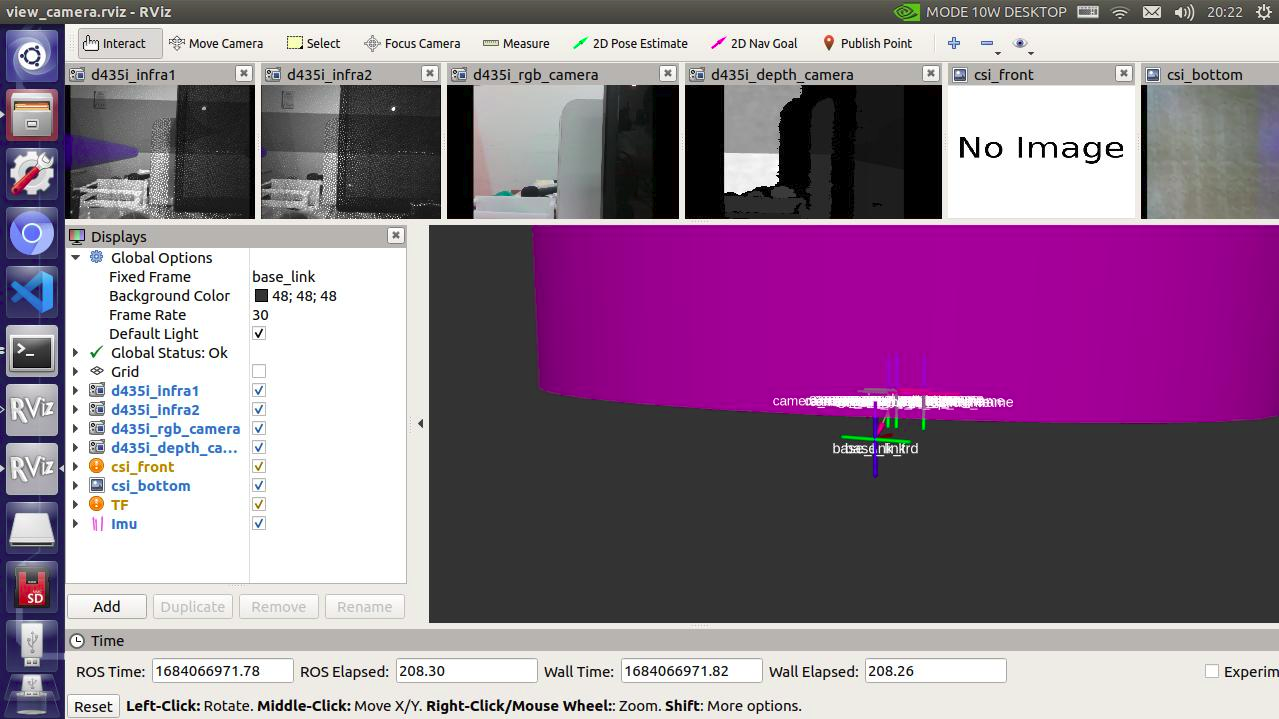
本设备有两个cis摄像头和一个realsense深度相机,用户可通过如下指令进行全部查看
roslaunch handsfree_uav_camera view_camera.launch
之后可查看所有摄像头图像
启动 mavros
在非动捕环境下启动 mavros 时,需要加上如下所示参数
roslaunch handsfree_uav_hw uav_hw.launch enable_mocap:=false