ORB_SLAM建图
ORB_SLAM 是一种基于ORB特征的三维定位与地图构建算法,该算法由Raul Mur-Artal,J. M. M. Montiel和Juan D. Tardos于2015年发表在IEEE Transactions on Robotics。其核心是使用 ORB (Orinted FAST and BRIEF) 作为整个视觉 SLAM(simultaneous localization and mapping,即时定位与地图构建) 中的核心特征。 它是一个完整的 SLAM 系统,包括视觉里程计、跟踪、回环检测,是一种完全基于稀疏特征点的单目 SLAM 系统,同时还有单目、双目、RGBD 相机的接口
依赖
1、安装依赖的软件:OpenCV (computer vision library)
2、建议配置好我们官方的 Handsfree 和 ROS 开发环境,可以忽略安装 OpenCV 。
如何使用
本设备已默认编译配置好应有的环境,用户只需打开终端输入以下指令:
export ROS_PACKAGE_PATH=${ROS_PACKAGE_PATH}:/home/handsfree/handsfree/orbslam2_ros_ws/ORB_SLAM2/Examples/ROS/
接着在同一个终端下输入以下命令
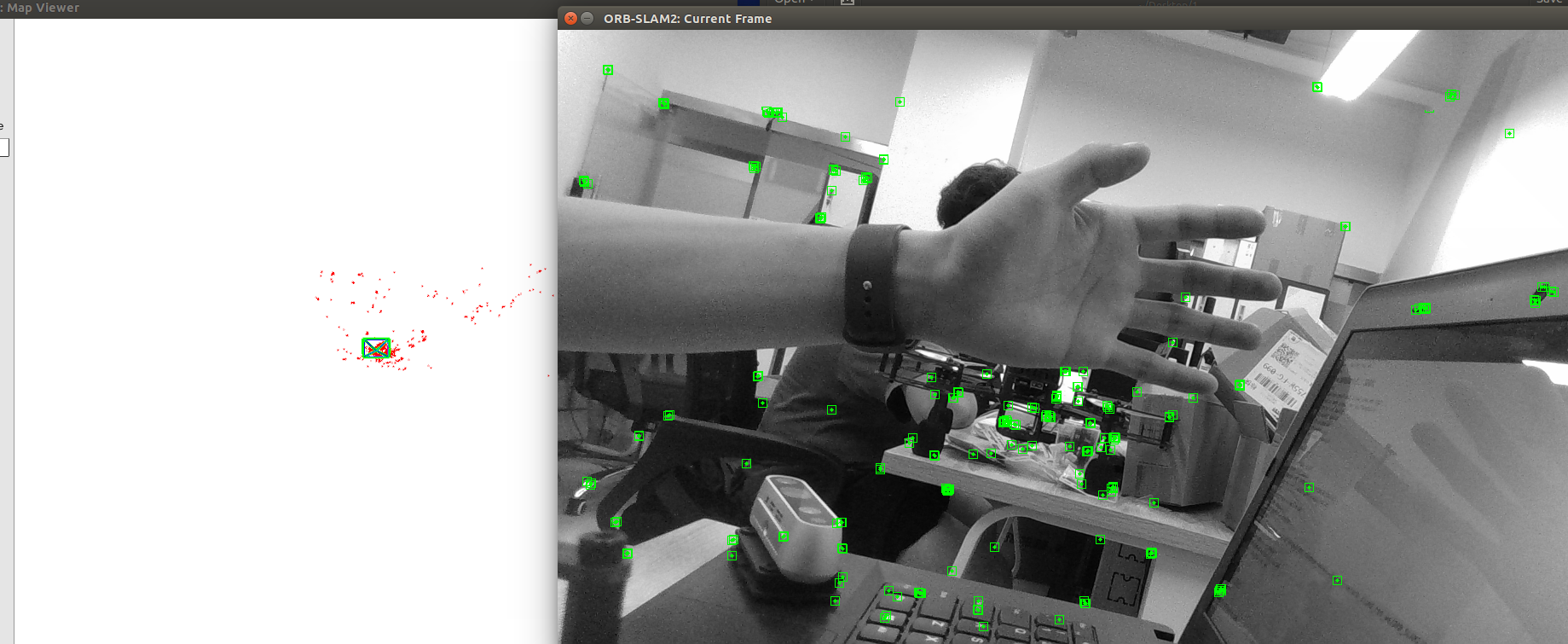
roslaunch ORB_SLAM2 realsense_orb_slam2_uav.launch
显示如下画面即成功运行