Q300无人机使用手册

1 产品简介
Q300 作为深圳朝闻道智能信息科技有限公司面向科研院所以及无人机爱好者等研发的无人机平台,支持了PX4, Dronecode, ROS, Nvidia, 和 Ubuntu等高级软件社区,该平台具有以下特点:
- 模块化设计,可搭载Nvidia Jetson Nano 和 Nvidia Jetson Xavier NX 系列主机 , Inter Realsense 深度相机
- 机身紧凑,室内外场景通用
- 配套软件含ROS (Robotic Operating System) melodic and Nvidia Jetpack SDK
- 支持实时图像处理和深度学习应用
- 支持室内SLAM和室外避障等高端功能
- 丰富用例:飞行控制设计、ROS编程、适用于无人机AI应用及其他教育场景的原型设计
- 长期软硬件支持
2 发货清单
| 序号 | 名称 | 图片 | 数量 |
|---|---|---|---|
| 1 | Q300无人机机体 |  |
1个 |
| 2 | 主机(Jetson Xavier NX/nano) |  |
1个 |
| 3 | 光流TOF模块 | 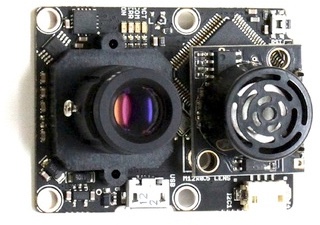 |
1个 |
| 4 | WiFi数传 |  |
1个 |
| 5 | 机载CSI相机 | 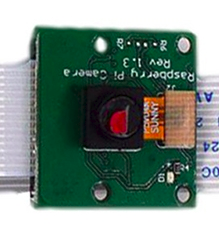 |
2个 |
| 6 | Inter Realsense 实感双目相机 |  |
1个 |
| 7 | 激光雷达 |  |
1个 |
| 8 | 动力锂电池 |  |
3块 |
| 9 | 螺旋桨 |  |
2套 |
| 10 | 配件包 |  |
1套 |
| 11 | 6角工具包 |  |
1套 |
| 12 | 螺丝包 |  |
1套 |
| 13 | 飞机安全防护罩 |  |
4个 |
| 14 | 备用脚撑 |  |
4个 |
| 15 | 电池电压显示模块 | 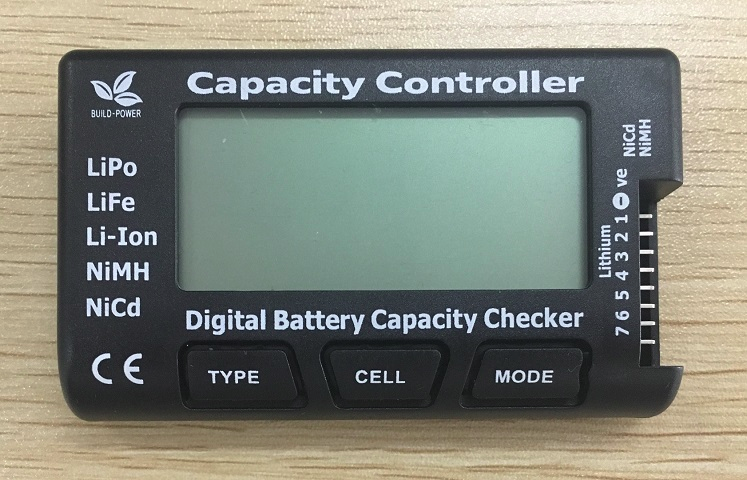 |
1个 |
| 16 | 线材包 |  |
1套 |
| 17 | 栓机绳 |  |
1个 |
| 18 | 锂电池充电器 |  |
1套 |
| 19 | 无人机遥控器 |  |
1个 |
| 20 | 遥控器挂绳 |  |
1个 |
| 21 | 遥控器备用电池 |  |
8个 |
| 22 | 泡沫地垫 | 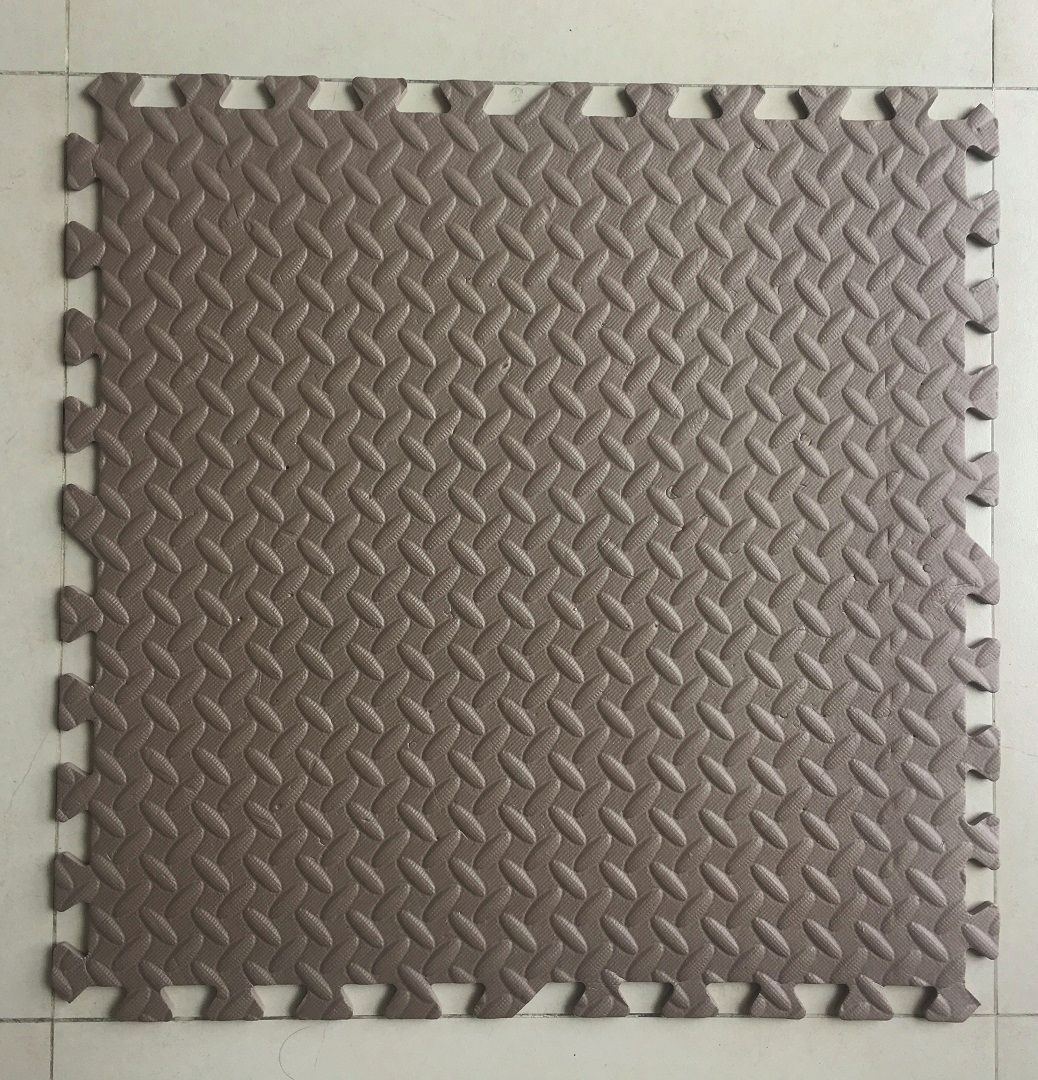 |
8个 |
| 23 | 航空箱 |  |
1个 |
3 产品介绍
3.1 整机介绍

无人机正视图

无人机正侧图
无人机后侧图

3.2 遥控器使用说明
富斯遥控器为Q300无人机产品配件,遥控器使用左手油门,两个摇杆均自动回中,使用遥控器可以轻松控制Q300无人机,在本产品采用左手油门(美国手)的设计。其定义及其功能可参考下图。

本设备的遥控器使用如下图所示

注意:解锁需要把拨杆拨到最顶端,油门拉到底


本遥控器按钮的功能定义为:
- SWA定义了无人机的紧急关浆
- SWC定义了无人机的三种飞行模式, 该通道的前中后三个档位分别对应了无人机的 Manual, Position 以及 Offboard三种飞行模式
- S1定义了无人机的垂直运动和偏航运动
- S2定义了无人机的俯仰运动和横滚运动
其他按钮暂未定义
注意:遥控器出厂前映射已设置好,请勿随意更改。
3.3 充电
发货前因安全原因,无人机电池中仅有一半的电量,用户在收到无人机后,应充满电后再行使用
无人机电池充电步骤如下:
连接充电器
请按照如图所示方式连接充电器和电池
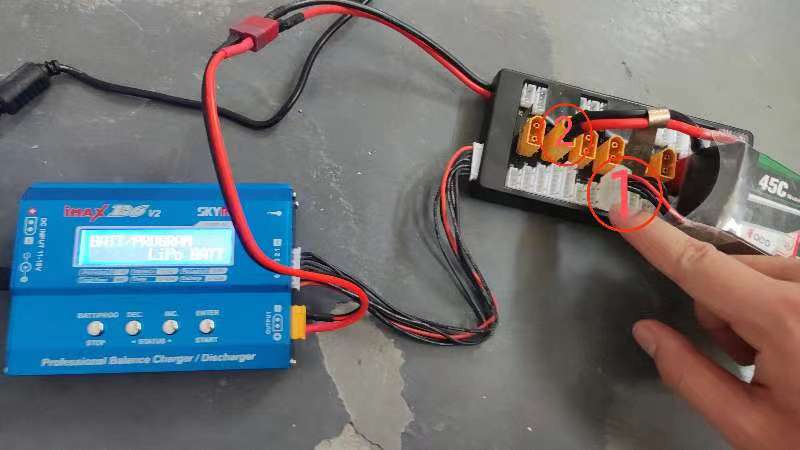
①先把白色接头插到并充板的4S位置
②插上黄色接头设置充电器参数
如图所示设置为BATT/PROGRAM


如上图所示,充电器接通电源后会显示如下所示界面,此时可以短按Dec和Inc (Inc为下一项,Dec为上一项) 按钮来选择充电模式,建议使用BALANCE CHG模式充电.确定充电模式后,通过短按Start按钮进入参数设置界面. 进入设置界面后,短按Start按钮可以更改选项,可以通过短按Inc和Dec这两个按钮来调整对应的参数值,建议使用3.0A充电.开始充电
参数设置完成后,通过长按Start按钮即可进入待充电状态,如下图所示

之后,通过点击Start按钮即可开始充电, 如下图所示

等待充电结束 完成以上步骤,等待充电结束即可,再次过程中请务必注意用电安全,以免发生安全事故
注意事项 无人机电池在使用结束后,由于温度过高,不能立即充电,需要静置10~15分钟,待电池温度降到室温后即可开始充电
3.3.1 电压测试模块
电压测试模块,用于测量电池电量。如下图所示
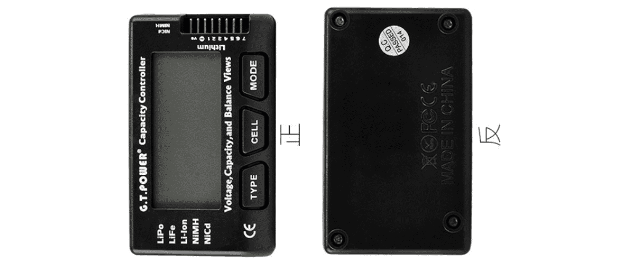
通过按TYPE,可依次选择LIPO(锂聚合物电池)、LIFE(锂铁电池)、LI0N(锂离子电池)3种锂 电池并显示相应的电压和电量值。
通过按键MODE可以选择显示总电压和电池节数TOTAL,最大的电压和电池MAX,最小的电压和电池 MIN,最大电压和最小电压的电压差MAX-MIN。
通过按键CELL,可以查看各节电池的电压和电量,总电压和总电量,在镍氢,镍镉电池模式下。
(1)通过按键CELL可以查看各节电池的电压和电量,总电压和总电量。
(2)可以测试1S电池(电压检测范围3.600V-1500V显示电压。)按键操作过程:
(1)TYPE:这样电池类型,可以在LPO,LIFELION之间切换。
(2)CELL:这样显示各节电池的电压。
(3)MODE:选择显示各种模式,可以在TOTAL,MAX,MAX-MIN之间切换。使用说明 若是锂电池,则将电池平衡头上的负极对准2-7S电显排针端的“一”极端,平衡头上的其他孔位依次插 入电线排针内就行,如是测镍氯,镍镉电池组输出插头的负极对准电显3PIN排针端的“一”极。如下图所示。

3.4 状态指示
飞控配备有信号灯,用户可根据信号灯判断无人机当前状态
| 信号灯状态 | 描述 |
|---|---|
| 红蓝交替闪烁 | 初始化传感器,此时请静置无人机 |
| 蓝色闪烁 | 锁定状态(满足自稳模式解锁条件),但GPS尚未定位成功。需要使用到 GPS 定位的飞行模式无法启用 |
| 蓝色常亮 | 无人机处于锁定状态,无GPS |
| 绿色闪烁 | 无人机处于锁定状态(已满足解锁条件),GPS已定位成功 |
| 绿色快速闪烁 | 搜索高精度SBAS GPS卫星。无人机处于锁定状态(已满足解锁条件),GPS已定位成功 |
| 绿色常亮且蜂鸣器发出一声长音 | 无人机已解锁并准备起飞 |
| 黄灯双闪 | 解锁失败(请检查地面站的输出内容) |
| 黄色闪烁 | 故障保护激活 |
| 黄蓝闪烁且蜂鸣器发出嘟嘟嘟的响声 | GPS故障或GPS故障保护激活 |
| 红黄闪烁 | 禁用卡尔曼滤波器或惯性导航(错误) |
| 紫黄色闪烁 | 气压计故障 |
| 红色常亮 | 硬件异常。通常为未检测到TF卡(重新插入TF卡或更换)、MTD设备或IMU传感器。您可以查看 boot 目录下的Boot.txt文件中的信息 |
| 红色常亮且发出SOS声音 | 固件丢失;SD卡丢失或SD卡格式错误 |
3.5 功能参数
| 参数类型 | 项目 | 指标 |
|---|---|---|
| 机体参数 | 长x宽x高 | 366mmx366mmx217.5mm |
| 对角电机轴距 | 300mm | |
| 机体净重 | 1.0kg | |
| 机身材质 | 碳纤维 | |
| 电调 | 四合一电调 | |
| 电池 | 5300mAh 4s LiPo电池 | |
| 性能参数 | 最大速度 | 3.0m/s |
| 最大载荷 | 1.0kg | |
| 最大飞行时间 | 12min | |
| 悬停精度 | 水平精度±0.1m | |
| 其它参数 | 抗风等级 | 3-4级 |
| 工作环境 | 室内 | |
| 工作温度 | 6°C-40°C | |
| 控制参数 | 控制模式 | 遥控控制 |
| 遥控器 | 2.4G/极限距离100m |
3.6 主要零部件
3.6.1 主机参数
| 项目 | 指标 |
|---|---|
| AI性能 | 21TOPS |
| GPU | 384-core NVIDIA Volta GPU 和 48 Tensor Cores |
| CPU | 6-core NVIDIACarmel ARM v8.2 64-bit CPU |
| 6MB | L2+4MBL3 |
| 内存 | 8GB 128-bit LPDDR4x 51.2GB/s |
| 存储 | 16 GB eMMC5.1 可扩展 |
| 功耗 | 10W/15W |
| PCle | 1×I(PCleGen3)+1×4(PCleGen4),total144GT/s |
| 深度学习加速器 | 2个NVDLA引擎 |
| 视觉加速器 | 7路VLIW视觉处理器 |
| 网络 | 10/100/1000 BASE-T Ethernet |
| 结构尺寸 | 69.6mm×45mm |
| 260-pin SO-DIMMconnector |
3.6.2 双目深度相机参数
| 项目 | 指标 |
|---|---|
| 使用场景 | 室内/室外 |
| 深度技术 | 主动红外立体(全局曝光) |
| 深度视野(FOV-水平x垂直x对角线) | 85.2°x58°x94°(+/-3) |
| 深度图像输出分辨率 | 1280 x 720 |
| 深度图像输出帧率 | 90 fps |
| 最小深度距离 | 0.1m |
| 传感器曝光类型 | 全局曝光 |
| 最远距离 | 10m,随校准,场景和照明条件而变化 |
| RGB传感器图像输出分辨率和帧率 | 1920 x 1080 30fps |
| RGB图像视野(FOV-水平x垂直x对角线) | 69.4°x42.5x77°(+/-3°) |
| 相机尺寸 | 90 mm x25 mmx 25 mm |
3.6.3 CSI 相机参数
| 项目 | 指标 |
|---|---|
| 像素 | 800万 |
| 角度 | 120° |
| 分辨率 | 3280 x 2464 |
3.6.4 雷达参数
| 项目 | 指标 |
|---|---|
| 扫描角度 | 360° |
| 角度分辨率 | 0.80 |
| 测量频率 | 4500次/s |
| 扫描频率 | 10HZ |
| 测量距离精度 | 测距3m~12m: ±20mm |
| 测量半径 | 白色物体:13.4m黑色物体:13.4m |
| 最小测量距离 | 0.1m |
| 通信接口 | 标准异步串口(UART) |
4 初次使用
用户在收到无人机以后,可参考以下步骤来完成第一次的飞行
4.1 地面站的下载与安装
为了及时获取到无人机飞行时的状态,避免意外的发生,建议每次飞行前都确保无人机已经连接到地面站( QGroundControl ).
用户可前往http://qgroundcontrol.com/ 根据自己的设备选择下载相应的安装包,下载过程此处不再赘述
之后可参考https://docs.qgroundcontrol.com/master/en/getting_started/download_and_install.html来安装QGroundControl
- QGC地面站连接飞机
首先连接到飞机的数传wifi:handsfree_uav###,其中###为无人机编号

4.2 传感器的校准
出于运输环节振动和地区差异考虑,强烈建议用户在收到无人机以后,对罗盘、陀螺仪、加速度计等传感器进行校准,以避免出现未知的异常。 使用WiFi数传将pixhawk飞控连接到一台运行QGroundControl (QGC) 的电脑,可以轻松实现传感器校准。
4.2.1 罗盘校准
注意:为避免对校准结果产生影响,请选择远离大型金属物体或磁场的位置完成校准
校准步骤:
- 启动 QGroundControl(以下简称QGC) 并连接到无人机
- 点击 QGC 菜单栏中的齿轮图标进入设置页面
- 点击 Sensors ---> Compass 进入罗盘校准页面
如下图所示,点击 OK 按钮开始校准
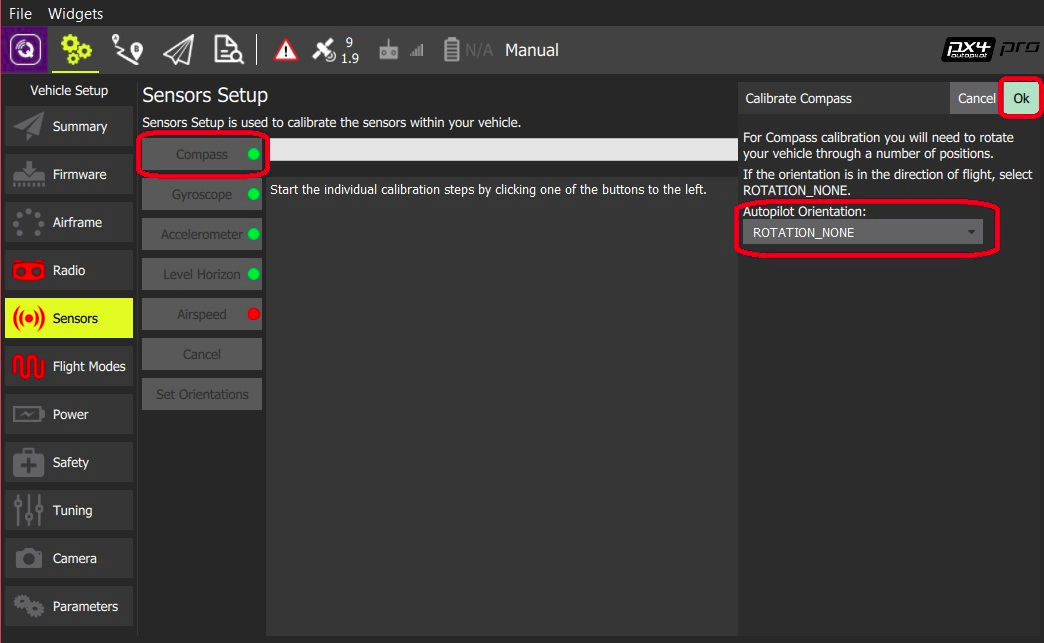
执行校准 如下图示
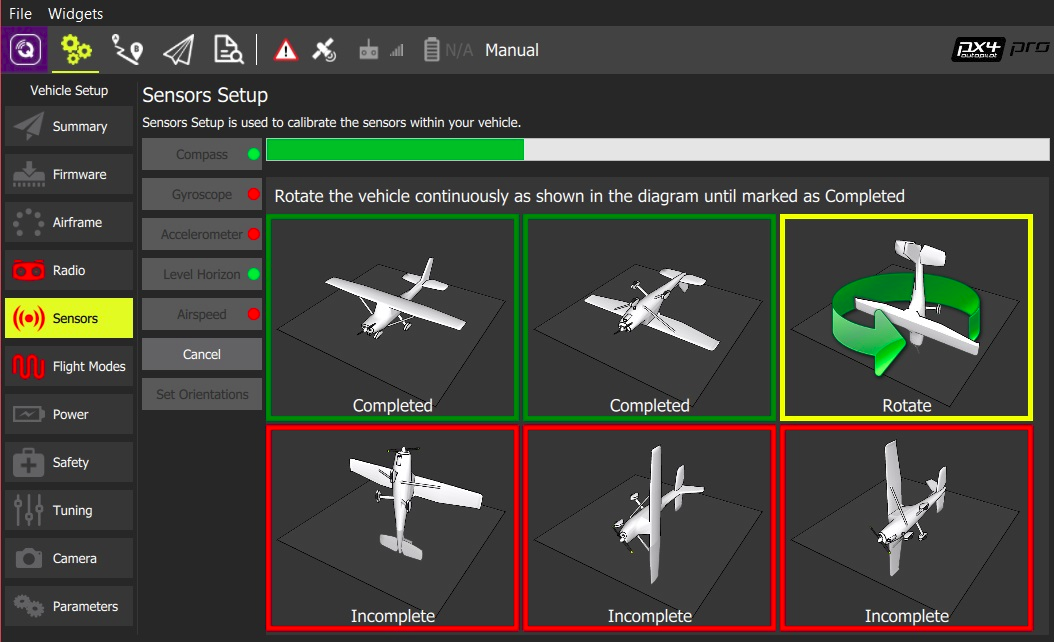
将无人机置于红色方框(没有完成校准)所示的任意方向并保持不动。 等待出现提示(方向图像变为黄色)后,围绕指定轴顺时针或逆时针旋转无人机。完成当前方向的校准后,屏幕上的相关图像将变为绿色。之后重复该步骤,直到完成所有方向的校准(所有框都变为绿色)
4.2.2 陀螺仪校准
校准步骤:
- 启动QGC,并确保无人机连接到地面站
- 点击 QGC 菜单栏中的齿轮图标进入设置页面齿轮
点击 Sensors ---> Gyroscope 进入陀螺仪校准页面 如下图所示:
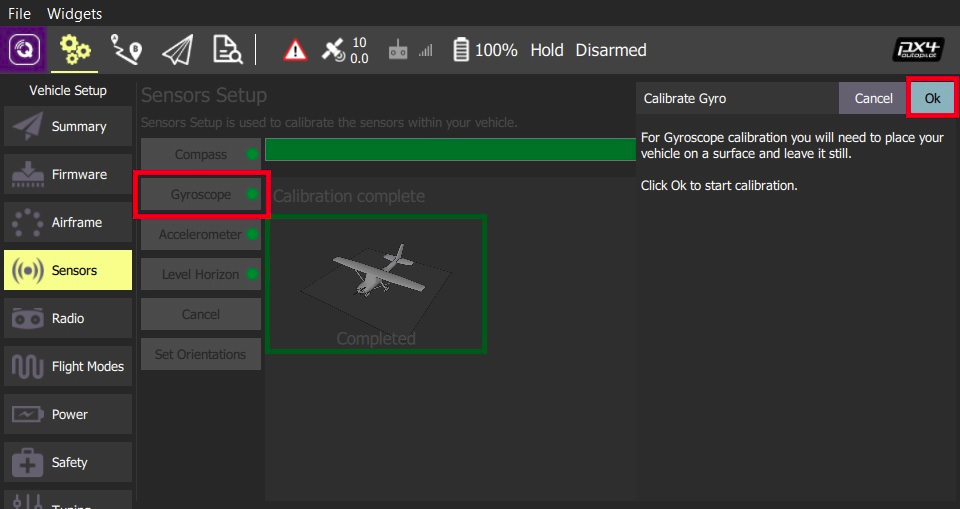
将无人机放置在一个水平面上静置不动
点击 OK 按钮开始校准
静置无人机,等待校准完成即可
4.2.3 加速度计校准
注意:如果该步骤校准结果较差,则会导致无人机在飞行前无法正常解锁
校准步骤:
- 启动QGC,并确保无人机连接到地面站
- 点击 QGC 菜单栏中的齿轮图标进入设置页面齿轮
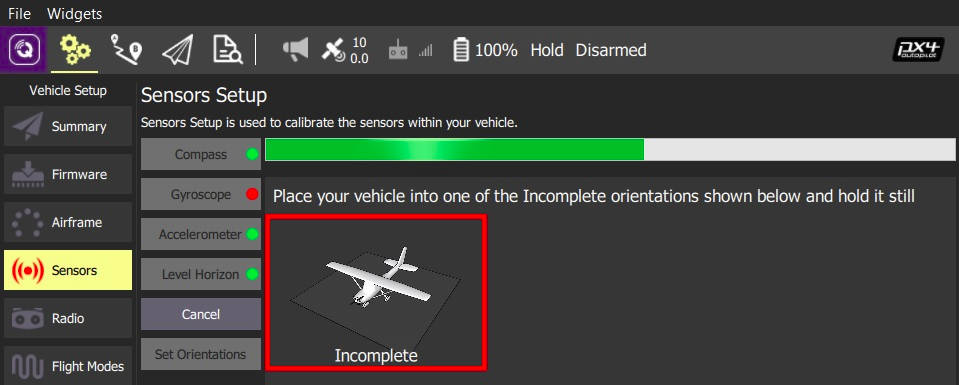
点击 Sensors ---> Accelerometer 进入加速计校准页面
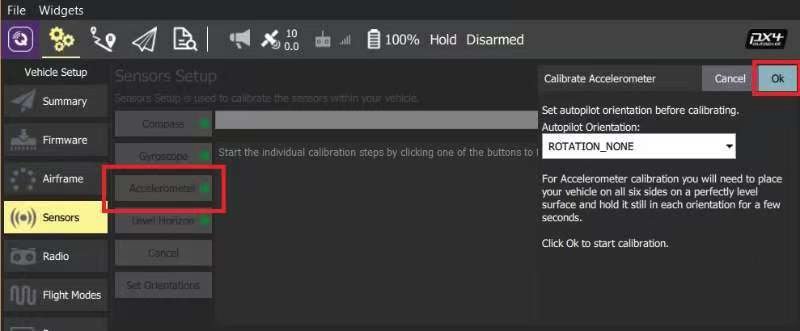
点击 OK 按钮开始校准
将无人机置于红色方框(没有完成校准)所示的任意方向并保持不动。 等待出现提示(方向图像变为黄色)后,保持无人机静止。完成该方向的校准后,该方向所对应的方框将变为绿色。之后重复该步骤,直到所有方向校准完成即可
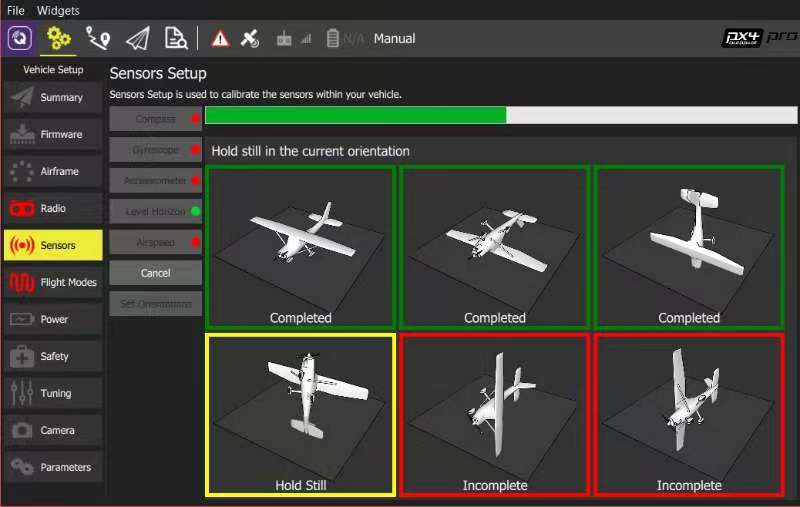
补充:在校准时,可以找一堵带有直线(作为参考线)的墙,在完成水平放置和倒置的校准后,可借助该直线完成其它四个方向的校准,如下所示




即将无人机的两个电机和该直线对齐,从而完成该方向上的校准,依次完成四个方向上的校准即可
校准结果检查:
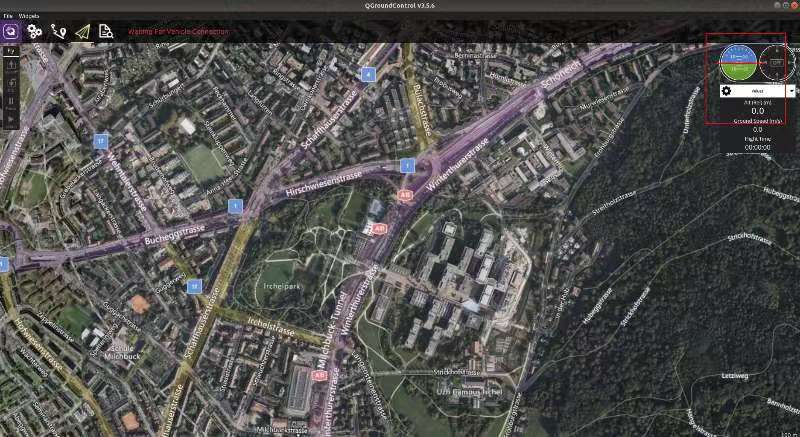
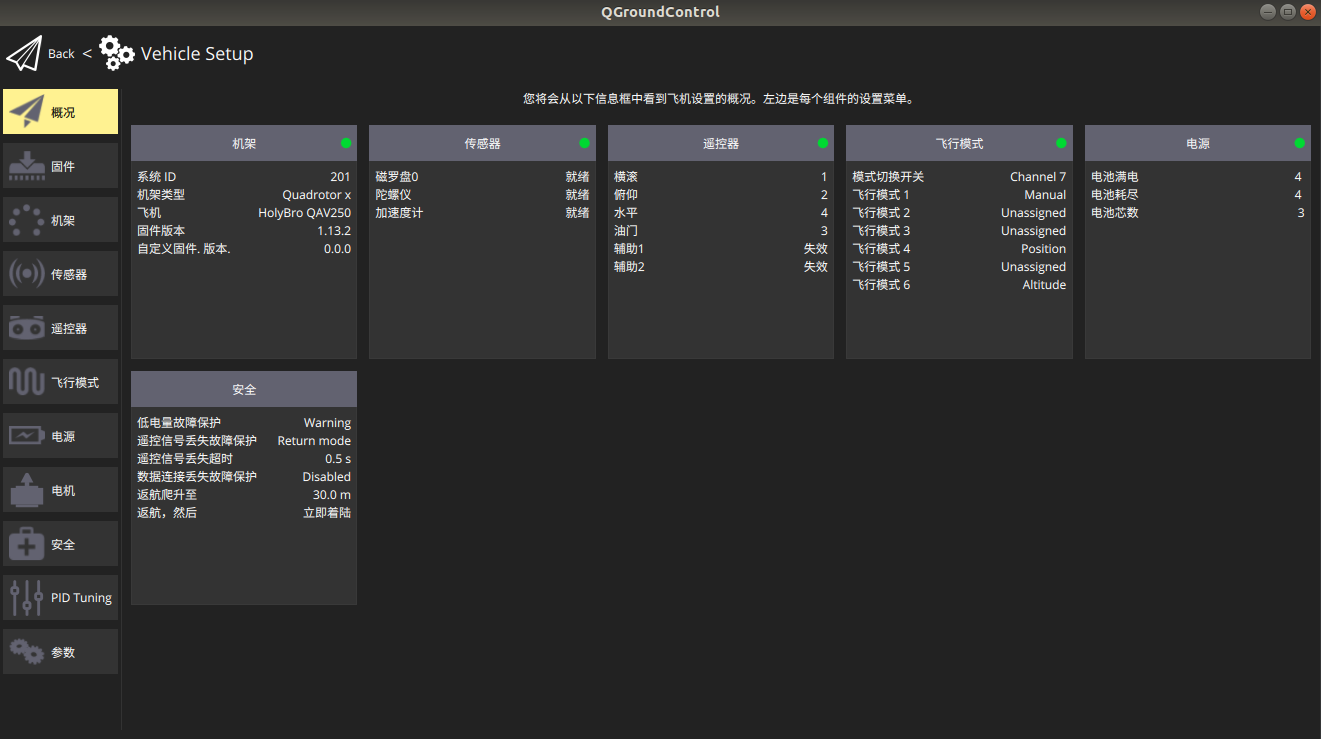
校准结束后可通过查看 QGC 主界面中右上角如图所示部分检查校准情况, 如果那条线相对水平,则表示校准结果比较理想,否则需要重新校准加速度计
4.2.4 水平面校准
校准步骤:
- 启动QGC,并确保无人机连接到地面站
- 点击 QGC 菜单栏中的齿轮图标进入设置页面齿轮
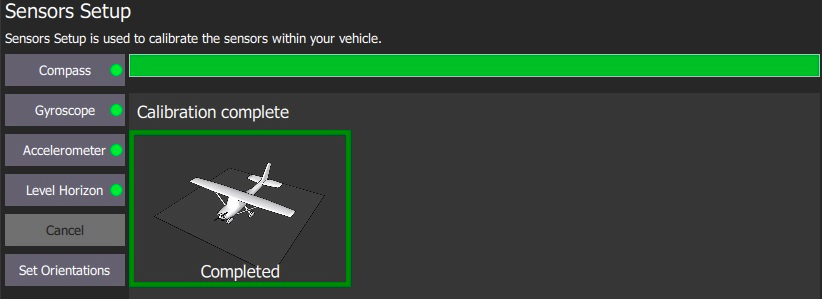
点击 Sensors ---> Level Horizon 进入加速计校准页面
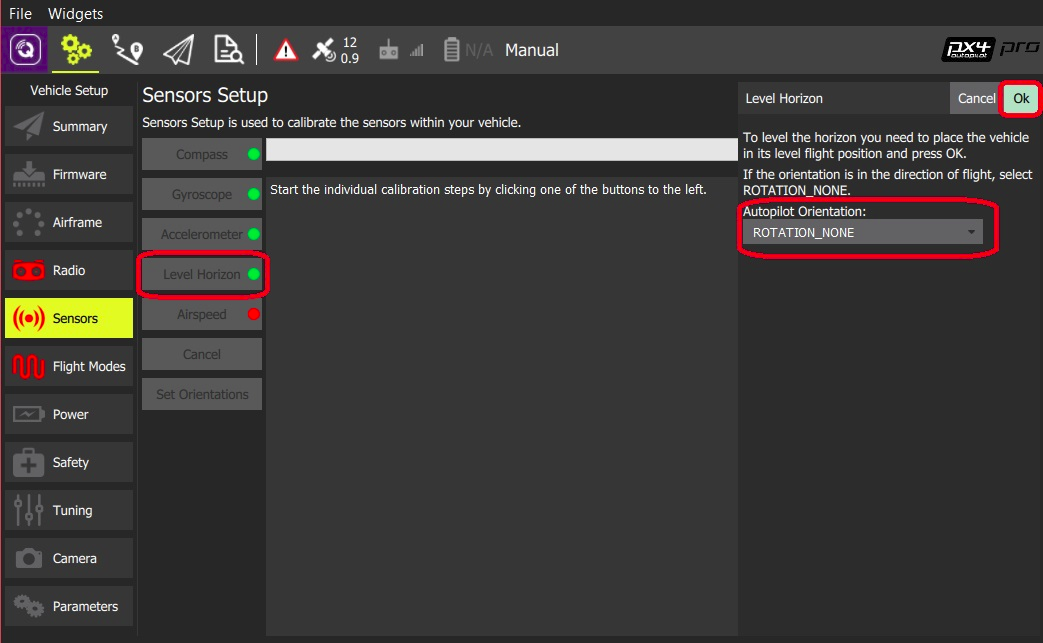
点击 OK 按钮开始校准
- 静置无人机,直到校准完成即可
4.3 飞行前的检查
仔细检查无人机自身是否有裂痕或损伤,机身螺丝是否有松动和异常
检查桨叶外观是否有破损、裂痕;检查螺旋桨是否扣紧
确保无人机电池电量充足,每个电芯的电压需要至少高于4v,对于4S电池,电压高于16v为宜
确保遥控器电池电量充足
确保电池已经固定完好,电池在飞行过程中不会松脱
4.4 初次试飞
4.4.1 初次试飞注意事项
对于第一次飞行, 应该注意以下内容
请在室内有安全防范措施进行, 在任何时候,请勿在机场、禁飞区、航空管制区、人群聚集地、闹市区、高压线等地方飞行,以免发生意外
请一位有经验的人来协助完成第一次试飞, 他们可以帮助您完成飞行前的检查, 如果在飞行过程中出现任何问题, 他们也可以协助解决
起飞前做好飞行计划, 确保您知道整个路线以及无人机将会在哪里着陆以及如何着陆
使用无人机损坏财产或伤人可能会产生重大的法律和财务后果(远远超过无人机本身的价值)
无人机应始终在没有障碍物或人员的安全区域内飞行,并且必须始终清晰可见
如果您失去对无人机的控制,并且无法使其恢复控制,请尽快将其撞毁在空旷区域
4.4.2 试飞
对于新手第一次飞行,建议使用 Position 模式飞行,在完成起飞前的检查后, 可按照如下步骤使用 Position 模式飞行:
确保遥控器所有开关均处于初始位置,且油门降到最低位置
电池接通上电
将数传天线连接到地面PC,等待无人机连接到地面站, 使用地面站监测无人机,有问题时地面站会及时给出最明确的提示信息
等待GPS锁星:通常可在2-3分钟后听到提示音,且 pixhawk 主灯变绿(使用光流模块进行 Position 模式飞行时可跳过这一步)
将遥控器的 Swb 拨杆打到中间档位(可参考3.2节中遥控器相关内容), 将飞行模式切换到 Position 模式;
拉低油门的同时右推偏航摇杆解锁无人机,解锁成功将听到一次长音提示;
慢速将油门推到中档以上,无人机将平稳起飞;
如果需要降落,可将油门慢速拉低(切忌将油门直接拉到最低点, 无人机落地过快容易伤到无人机);
无人机成功降落后,拉低油门的同时左推偏航摇杆锁定无人机
5 安全飞行
在开始使用本无人机前,请仔细阅读本节内容
5.1 产品使用注意事项
- 首次使用,请先仔细阅读本手册,了解基本操作内容与操作规范
- 请保持模块干燥,勿靠近水。
- 请小心保存模块,勿摔,勿撞,勿跌落。
- 如果是新手请在户外有熟练掌握无人机的飞手的指导下使用 Position 模式飞行
- 飞机调试时或在传感器校准时(电调)请务必卸下螺旋桨。
- 飞机上电时,传感器会进行初始化,请勿移动飞机
- 如果无人机非定制 IP 防护等级,无人机防水、防尘能力为 IP22
- 使用时注意信号传输距离,不要让无人机在超出控制范围外的区域飞行
- 注意无人机电池电量,必满因电池电量不足引发的无人机坠毁
5.2 飞行环境要求
- 恶劣天气下请勿飞行,如有风、下雪、下雨、雷电、有雾天气等
- 飞行时,请保持在视线内控制,远离障碍物、人群、水面等
- 请勿在地面高度落差较大的情况下飞行(如从楼层室内飞到室外),以免定位功能异常从而影响飞行安全
- 电池性能受到空气密度以及环境温度的影响。飞行器在海拔1000 米以上飞行时,由于环境因素导致电池及动力系统性能下降,飞行性能将会受到影响,请谨慎飞行
- 在遭遇火灾、爆炸、雷击、暴风、龙卷风、暴雨、洪水、地震、沙暴等灾害时不得使用飞行器
- 为防止移动设备与其他无线设备相互干扰,务必在关闭其它无线设备后再使用
- 禁止在电磁干扰源附近飞行。电磁干扰源包括但不仅限于: Wi-Fi热点、路由器、蓝牙设备、高压电线、高压输电站、移动电话基站和电视广播信号塔。若没有按照上述规定选择飞行场所,飞行器的无线传输性能将有可能受到干扰影响。若干扰源过大,飞行器将无法正常飞行
5.3 法律法规
请遵守当地法律法规使用飞行器,避免可能的伤害和损失。
5.4 安全须知
- 本产品不适合未满 18 周岁及其他不具备完全民事行为能力的人士使用
- 本产品具有较大的机身尺寸、高速旋转的螺旋桨和强大的飞行动力,在运行时具有一定的危险性。未按要求操作和使用本产品可能会发生危险和伤害
- 使用本产品时,请远离各种载人飞行器
- 本产品为非防水设计,请勿尝试在水面降落
- 操作本产品在低空飞行时,请始终保持无人机和人或动物保持 10 米以上的安全距离
- 在非人烟稀少的地区使用本产品时,请始终保持无人机在操作者目视范围内飞行
- 不要将本产品悬停或飞越人群上空,请勿以惊吓他人为乐
- 当有围观人群靠近时,请小心操控,尽快降落离开该场所,避免发生意外
- 请勿在儿童嬉戏的场所附近操作本产品。
- 请勿使用本产品追逐交通工具或影响交通工具的正常运行
- 非极其必要情况,请勿当本产品在空中飞行时关闭电机
- 本产品不可在饮酒、疲劳、服用药物、身体不适等情况下使用
- 请在每次使用前对本产品进行检查,包括但不限于零部件的牢固度、机体和螺旋桨的裂痕和磨损、电池电量、指示灯的有效性等。当发现异常时,请立即停止使用并更换相应配件
- 工作状态异常的无人机可能会发生意外,切勿启动螺旋桨或者勉强飞行
- 请勿尝试阻止本产品工作中的任何运动部件
- 请使用原厂配件进行维护和替换
- 转借给其他人员操作,请确保操作人员理解和遵守本安全须知
5.5 保养和维护
无人机作为一种比较精密电子机械设备除了正常使用外,要想保证其正常飞行和使用寿命,除了要保证按照规范正常操作使用外,请务必养成妥善保养无人机及其零部件的好习惯,保护无人机免受灰尘和污垢的侵害。
无人机的保养应注意以下方面:
保持清洁干燥:
无人机作为一种精密的电子设备是需要保持干燥清洁的,虽然无人机不是沾水即坏,但它如果沾水后或受潮后没有及时处理,会对电子元器件造成损坏使无人机出现故障并降低无人机的使用寿命。如果无人机在使用过程中受潮或沾水,在使用完毕以后要先断电擦干无人机,然后放到防潮箱吸潮,确定湿气除净后再使用。另外灰尘对无人机的影响也很大,尤其是电机等精密设备,所以要尽量避免从沙土碎石地面起飞,并在每次使用完毕以后对无人机进行除尘清洁。
电池保养:
无人机所有设备中,消耗量最大的非电池莫属了。使用电池时,应尽量避免过充或过放。飞行时尽量不要将电池电量耗尽,返航时至少要保持 15%以上的电量,且应匀速飞行。使用电池时可留意一下电压、电量下降速度是否过快。 在使用无人机的过程中也要注意外界温度对电池的影响,如果在低温地区使用,要对电池做好“保暖”和“热身”工作,以免出现电压急速升高的情况。
螺旋桨保养:
无人机螺旋桨作为无人机的升力来源,是需要经常维护保养的。如果出现撞到障碍物的情况就要特别留意桨叶是否出现裂痕、缺口等影响无人机飞行稳定性的问题。如果螺旋桨损伤比较严重则需要更换新的螺旋桨叶。
电机保养:
除了螺旋桨外,对无人机飞行稳定性影响最大的就是电机。如果无人机在悬停时出现无故侧倾或无法顺利降落的问题,则有可能是电机出现了问题。可以先尝试重新校正机身或重新校准传感器后再起飞。如果仍然出现这种问题则需要及时送厂检修,以避免出现电机停转导致无人机失控或坠毁。
飞行后的保养:
无人机使用结束后,操纵者都应对无人机做保养擦拭。用户可选用质地柔软的除尘毛巾擦拭浮灰。