ROS 驱动和可视化
以 ubuntu16.04,a9,python2.7 为例
先不要插 IMU 的 USB ,在终端输入
ls /dev/ttyUSB*来检测一下,然后在将 USB 插入电脑,再在终端输入ls /dev/ttyUSB*来检测一下,多出来的 ttyUSB 设备就是 IMU 的串口。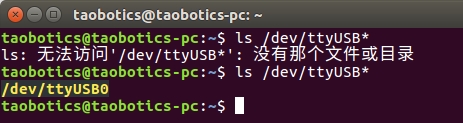
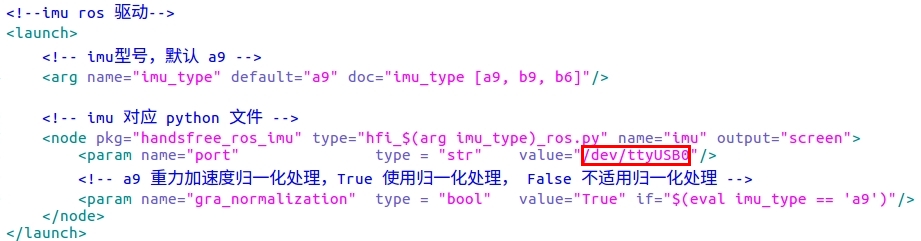
进入脚本目录,修改对应的 launch 文件中的 /dev/ttyUSB0(脚本默认用的 /dev/ttyUSB0)为你电脑识别出来的数字
打开终端,运行 imu 驱动,
imu_type:=** 为对应的型号,可选择有[a9, b9, b6]roslaunch handsfree_ros_imu handsfree_imu.launch imu_type:=a9打开两个新终端输入分别输入下面两行命令
rostopic echo /handsfree/imu rostopic echo /handsfree/mag如下图,驱动运行成功后和
rostop echo输出的信息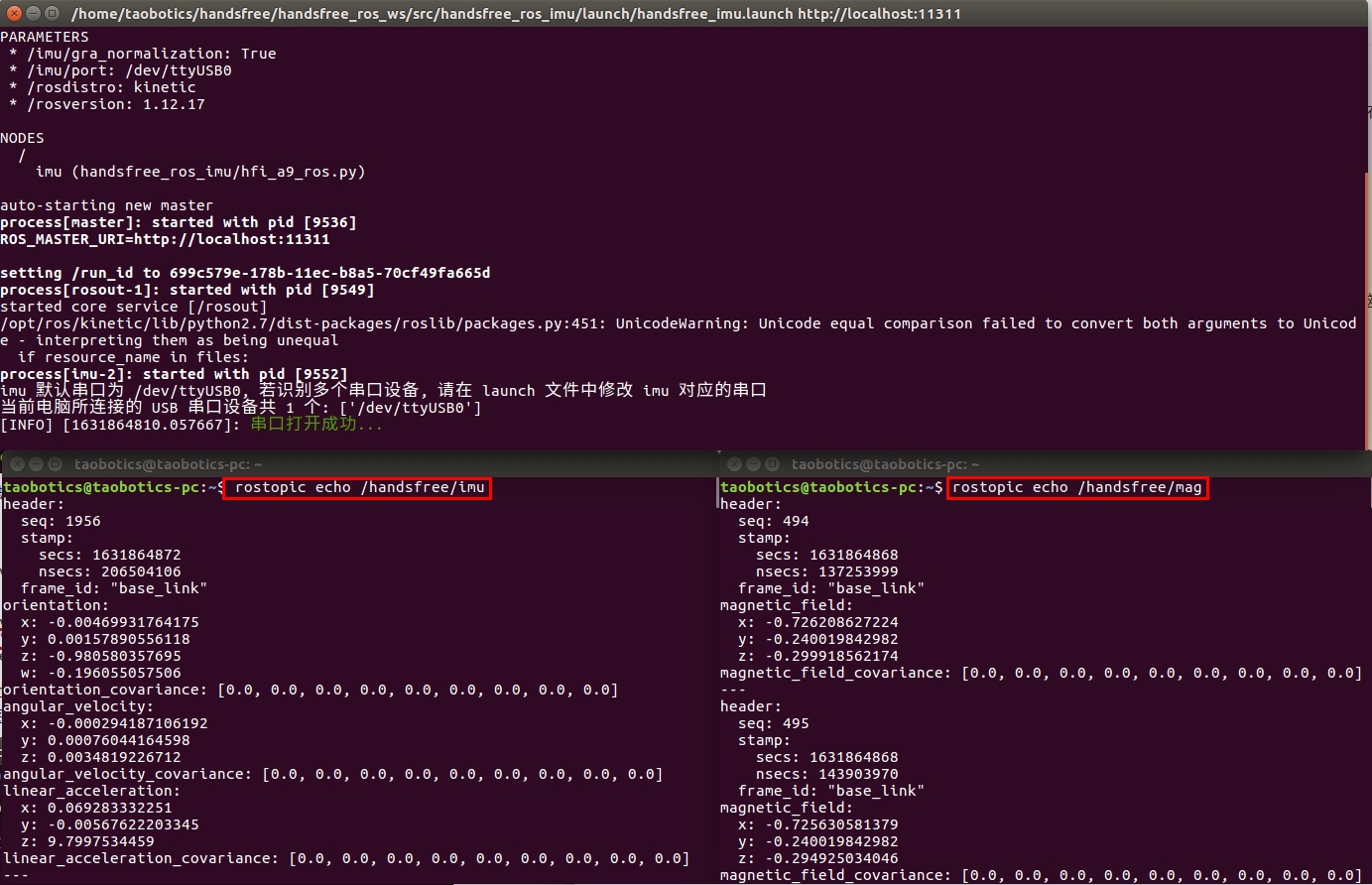
同理,如需要运行其他 launch 文件,需要先确保 launch 文件中的 /dev/ttyUSB 设备修改对。
相关文件说明
- display_and_imu.launch,打开打开 IMU 驱动节点和用 visual 编写的可视化模型。(仅支持 ubuntu 16.04)
- handsfree_imu.launch,打开用 IMU 驱动节点。
- rviz_and_imu.launch,打开 IMU 驱动节点和 Rviz 可视化。
- view_display .launch,单独打开用 visual 编写的可视化模型。
- view_rviz.launch,单独打开Rviz 可视化。