Comprehensive introduction
Quick navigation
《Selection introduction》:It contains basic knowledge of IMU, common selection problems, purchase instructions, etc.
《Companion package installation》:Including the use of windows, Linux and Linux + ROS.
《Python-driven testing》:Contains basic knowledge of IMU, common selection problems, purchase instructions, etc.
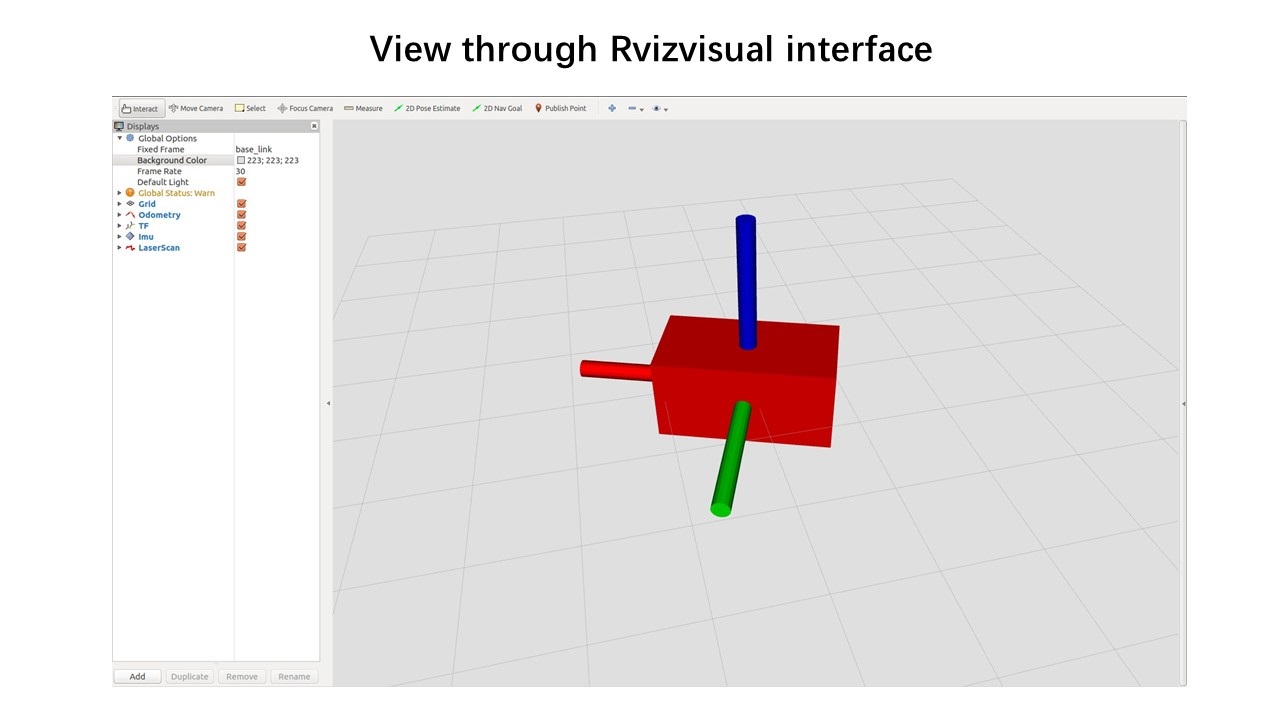
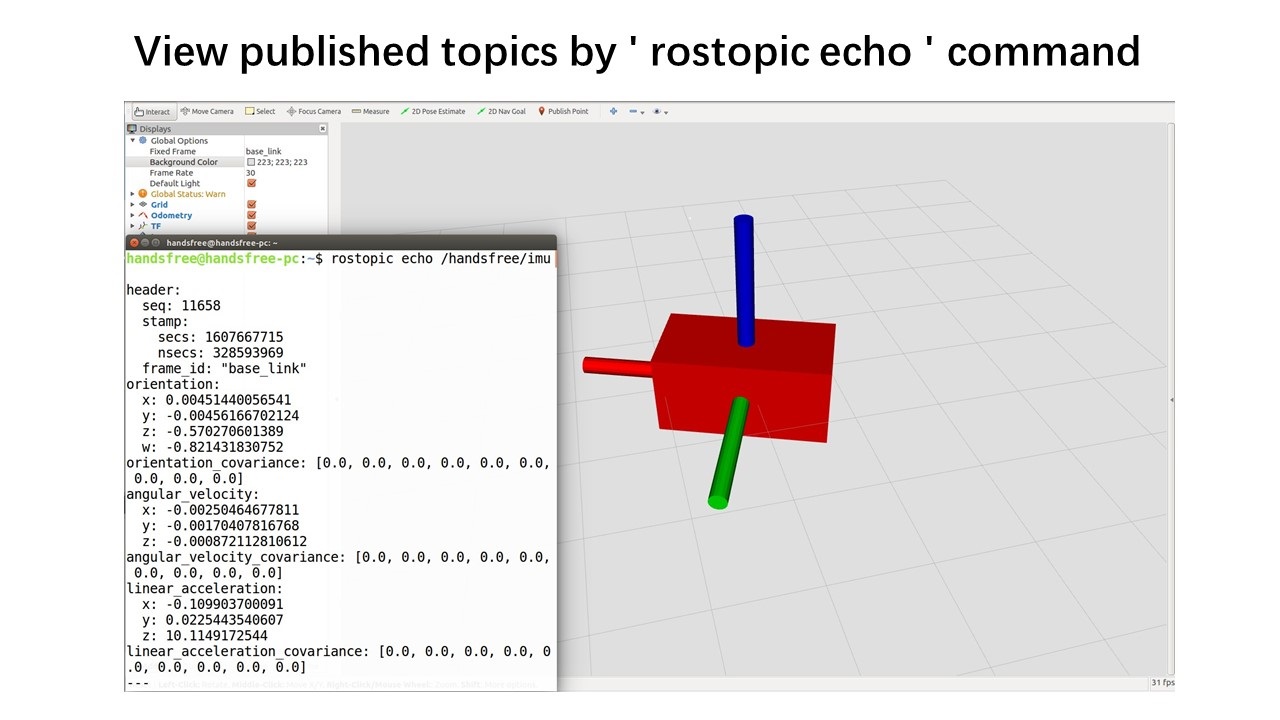
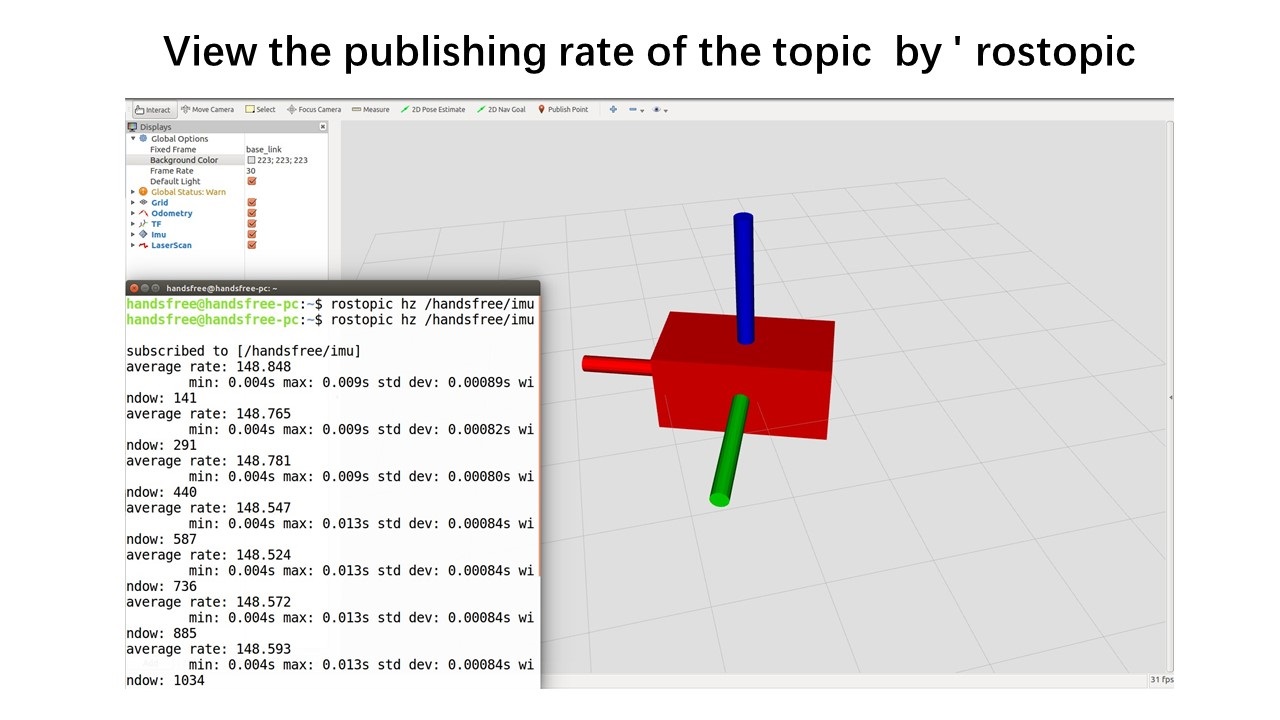
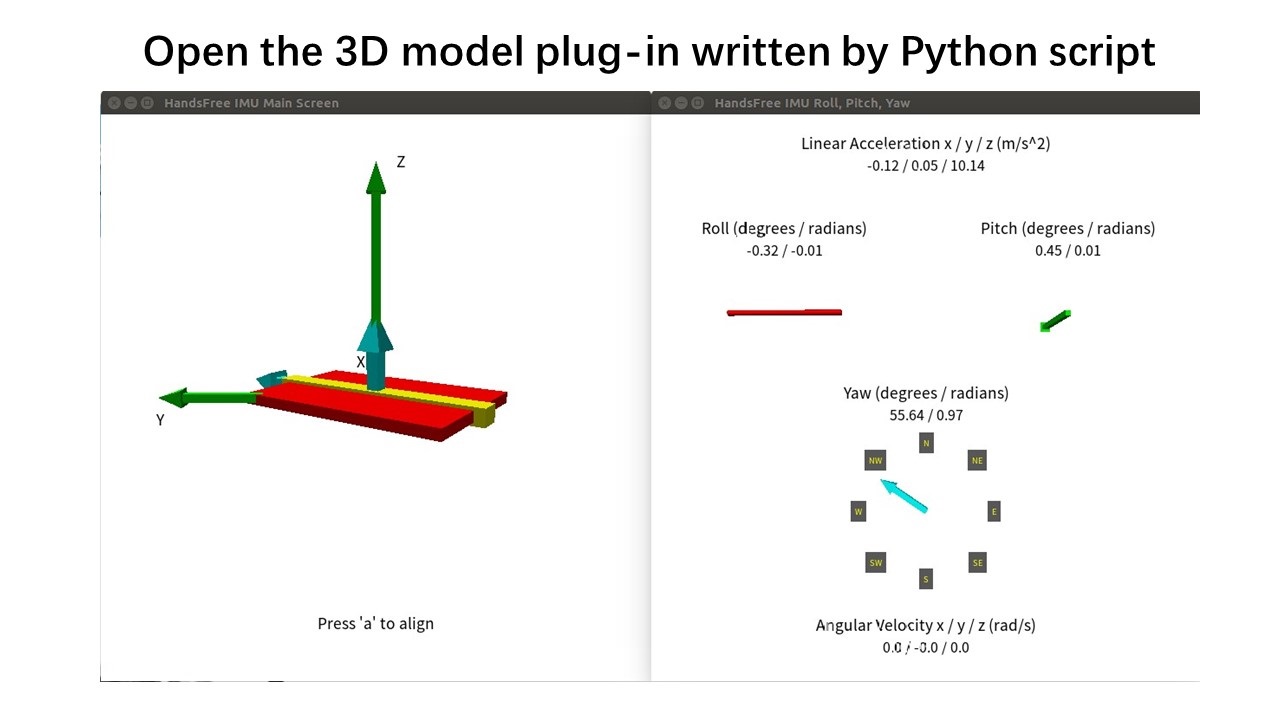
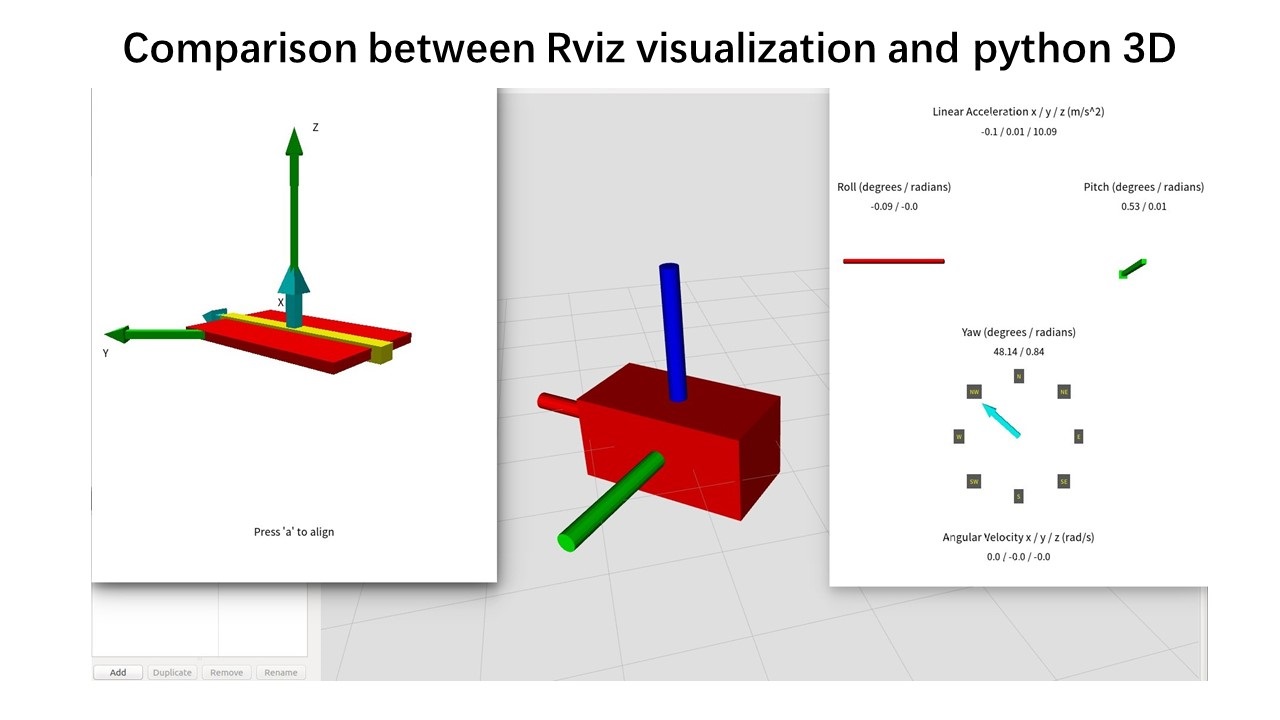
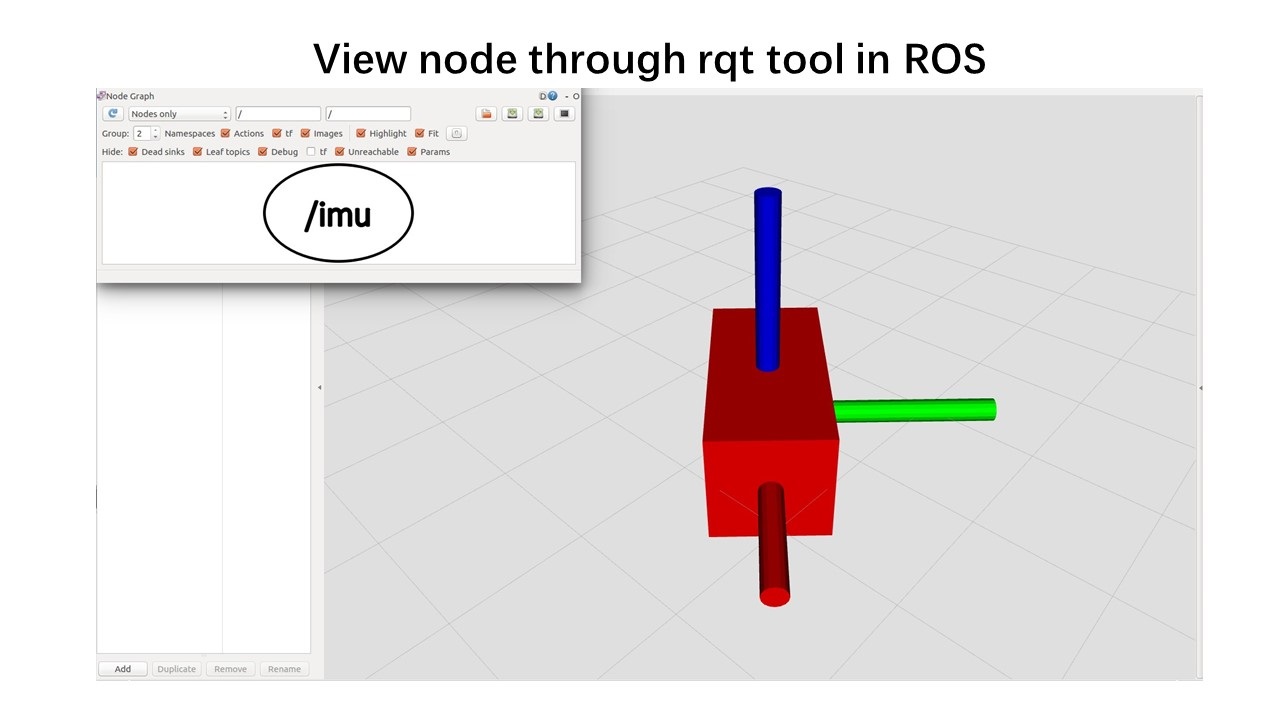
《ROS-driven testing and visualization》:ROS-driven testing and visualization
《Odometer and IMU fusion》:Odometer and IMU fusion using A9 as an example
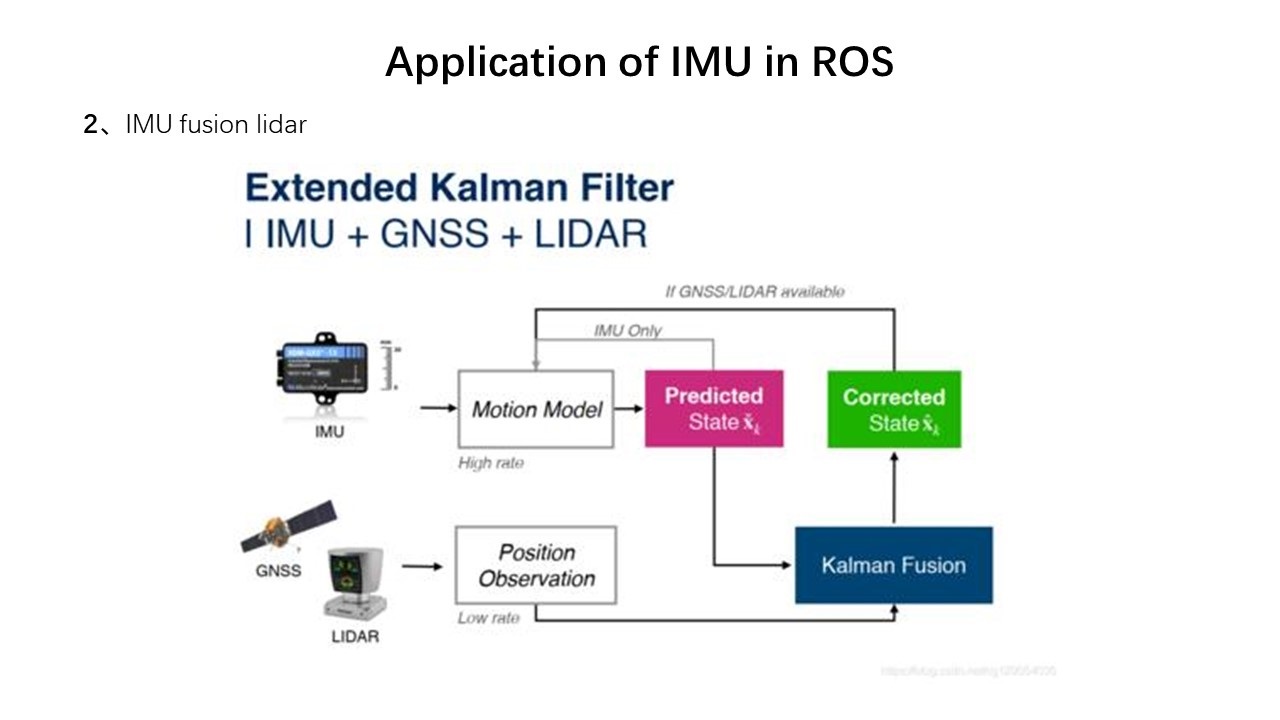
《Laser SLAM and IMU fusion》:Fusion of SLAM and IMU with A9 as an example
《Questions and Answers》:Contains question summary, how to ask, knowledge base and reference links
《appendix》:Serial Assistant Test Communication
HandsFree ROS IMU purchase link
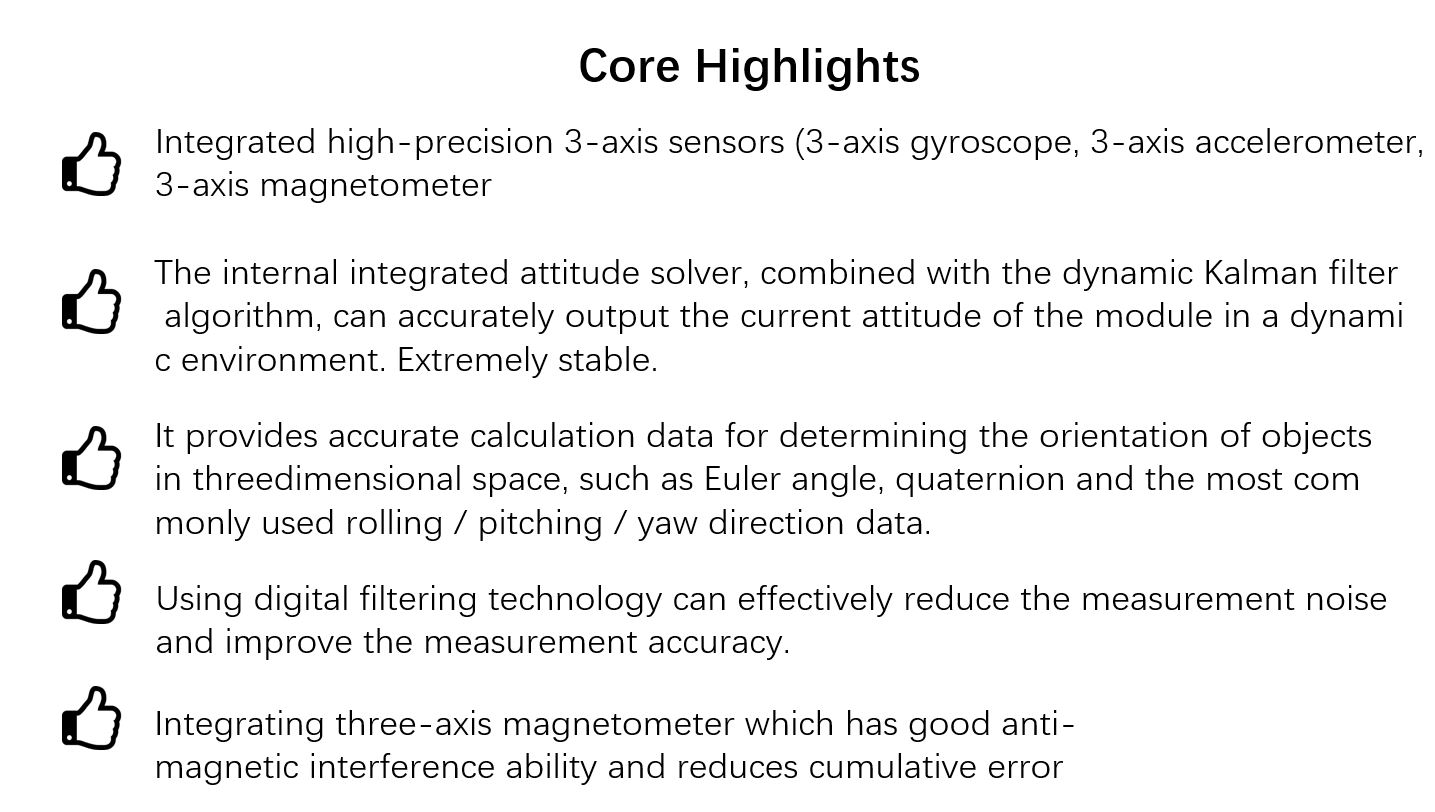
Product Features
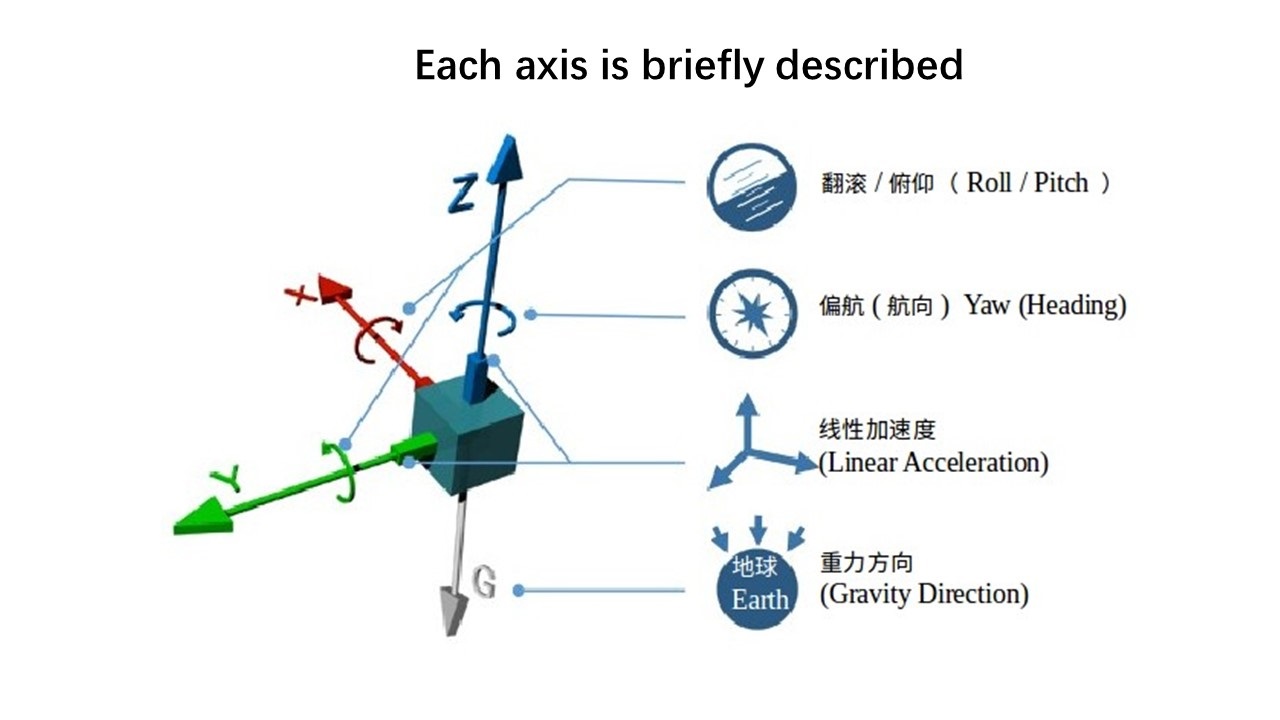
There are sensors such as accelerometer, gyroscope, and magnetometer in the IMU. After fixing the imu to the object, some information of the object during the movement process can be obtained, such as the three-axis acceleration information of the object, the three-axis angular velocity information, and the three-axis angle information. , three-axis magnetic field information. Through this information, the state of the object in the process of motion can be known.
Product number
There are 3 product models:
- A9:Three-axis acceleration information, three-axis angular velocity information, three-axis angle information, and three-axis magnetic field information can be obtained.
- B9:Three-axis acceleration information, three-axis angular velocity information, three-axis angle information, and three-axis magnetic field information can be obtained.
- B6:Three-axis acceleration information, three-axis angular velocity information, and three-axis angle information can be obtained.
Application comprehensive introduction
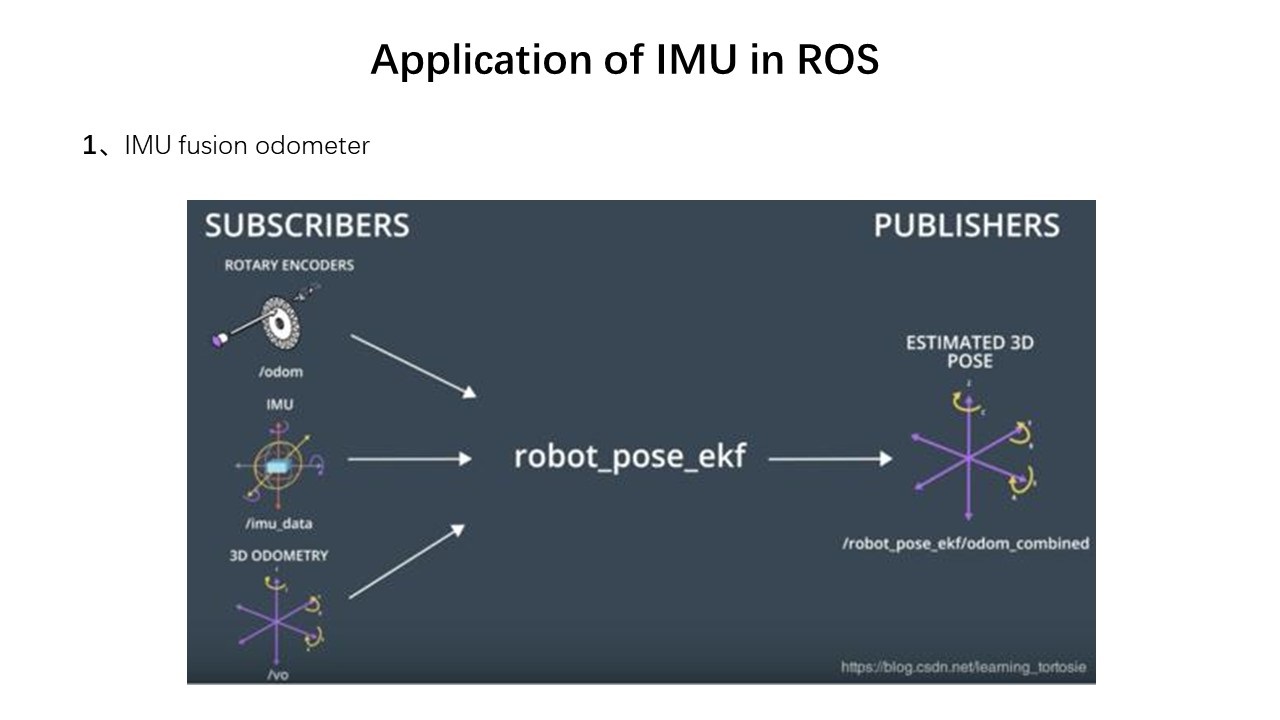
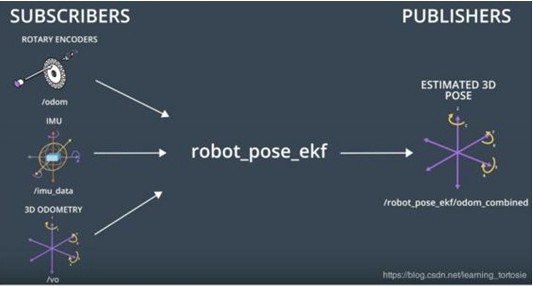
1、Odometer and IMU fusion
Through the robot kinematics solution, the measured motor motion data can be converted into odometer data. After the motor odometer integrates the data of the IMU yaw angle through the extended Kalman filter, the accuracy of the robot odometer can be greatly improved. Call it an inertial fusion odometer.
The weight information of the odometer can be determined by the slip collision detection module, which can judge whether slip and collision occur by detecting the current of the motor, the motor speed measured by the encoder, and the IMU data. If these situations occur, it means that the odometer will drift instantaneously. By reducing the weight of the odometer, the reliability of the positioning and navigation system can be guaranteed with a high probability.
2、Visual SLAM and IMU fusion
Visual SLAM is easily affected by image occlusion, illumination changes, and moving objects interfere with weak texture scenes. Monocular vision cannot measure scale, and depth information cannot be directly obtained. Only a single image cannot obtain pixel depth information, which requires triangulation. method to estimate the depth of map points. In addition, the pure rotational motion of the monocular cannot be estimated, and it is easy to be lost when moving rapidly.
The fusion of vision and IMU will make up for their respective disadvantages. Visual positioning information can be used to estimate the zero offset of the IMU to reduce the divergence and accumulated errors of the IMU caused by the zero offset. IMU can provide visual positioning during fast motion, and IMU can provide scale information to avoid monocular inability to measure scale.
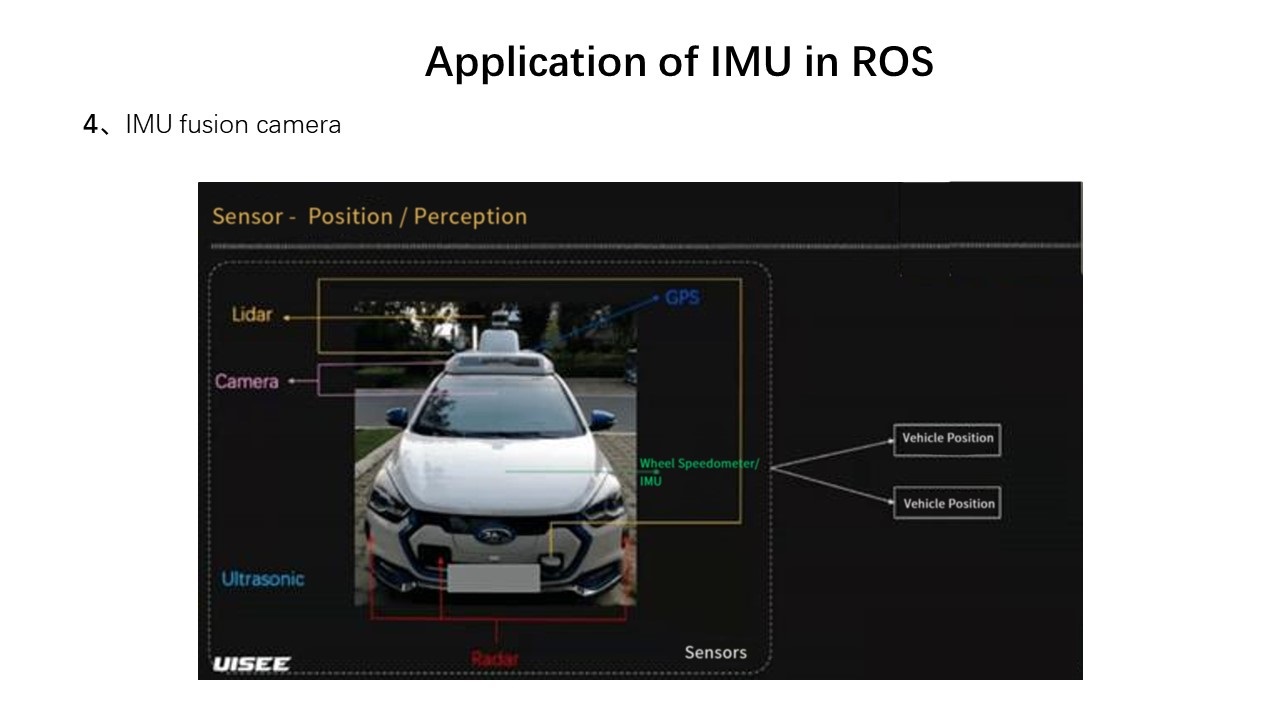
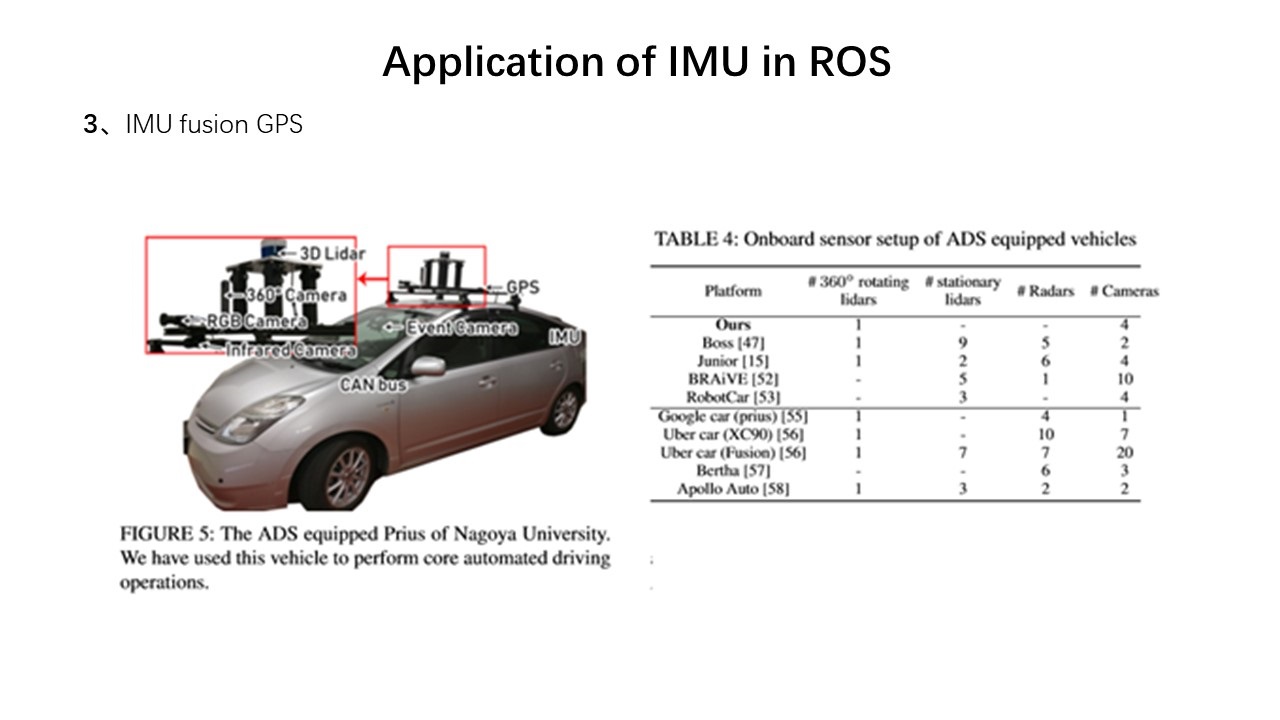
3、GPS and IMU fusion
The current GPS is often inaccurate or ineffective. For example, it is often unavailable in tunnels due to poor signals, or GPS signals are easily refracted and reflected in high-rise buildings in the city center. At this time, the IMU can enhance the navigation ability of GPS. For example, when the lane line recognition module fails, the road information perceived before the failure and the deduction of the car's track by the IMU can still allow the car to continue driving in the lane.
In addition, the GPS update frequency is too low (only 10Hz) to provide sufficient real-time location updates. The update frequency of the IMU can reach 100Hz or higher, which can completely make up for the lack of real-time performance of GPS. The combined GPS/IMU system can help autonomous driving complete positioning through global positioning and inertial update data at frequencies up to 100Hz. By integrating GPS with the IMU, the car can achieve location updates that are both accurate and sufficiently real-time.
The IMU, along with onboard ADAS and satellite positioning inputs, provides an accurate picture of the vehicle's position and heading, while dampening shock and vibration from normal driving.
4、other
IMU design has a wide range of applications, and plays an important role in military aerospace, navigation, military, medical, entertainment, robotics, vehicles and other fields.

propaganda