Selection introduction
IMU Basics
introduce
IMU is an inertial measurement unit, a device that measures the three-axis attitude angle (or angular rate) and acceleration of an object.
In general, an IMU contains three single-axis accelerometers and three single-axis gyroscopes. The accelerometer detects the acceleration signals of the object in the independent three-axis of the carrier coordinate system, and the gyroscope detects the angular velocity of the carrier relative to the navigation coordinate system. Signal, measure the angular velocity and acceleration of the object in three-dimensional space, and use it to calculate the attitude of the object.
The gyroscope and accelerometer are the main components of the IMU, and their accuracy directly affects the accuracy of the inertial system. In actual work, due to various unavoidable interference factors, the gyroscope and accelerometer generate errors. From the initial alignment, the navigation error increases with time, especially the position error, which is the main factor of the inertial navigation system. main disadvantage.
General xx axis IMU difference.
- 6-axis imu: three single-axis accelerometers, three single-axis gyroscopes
- 9-axis imu: three single-axis accelerometers, three single-axis gyroscopes, three single-axis magnetometers
- 10-axis imu: three single-axis accelerometers, three single-axis gyroscopes, three single-axis magnetometers, one barometer
Common name resolution
three-axis gyroscope: The three-axis gyroscope is the core sensitive device of the inertial navigation system. Its biggest function is to measure the angular velocity to determine the motion state of the object, so it is also called a motion sensor.
Three-axis accelerometer: It is an instrument for measuring the linear acceleration of the carrier.
magnetometer: For testing magnetic field strength and direction.
barometer: Calculate altitude by measuring atmospheric pressure.
6-axis fusion algorithm: The accelerometer is very sensitive to the vibration of the body. If there is a slight disturbance, the acceleration direction will be offset (the combined force of the external force and the gravity), but during long-term operation, the accelerometer data after the smoothing filtering algorithm is more credible. In contrast, gyroscopes are not sensitive to external disturbances, but will experience angular drift after long-term integration. Therefore, in practical applications, the data collected by the two are fused to complement each other.
9-axis fusion algorithm: When the body is horizontal, the accelerometer cannot measure the rotation around the Z-axis, that is, the yaw angle yaw, and the magnetometer cannot measure the rotation of the z-axis either. So use the accelerometer and magnetometer to calibrate the gyroscope at the same time.
All attitude angle: All attitude angle is used to describe the azimuth attitude of the object in space, which is divided into the attitude angle of the aircraft (missile) and the attitude angle of the satellite. The aircraft attitude angle is defined according to the Euler concept, so it is also called Eulerian angle. The aircraft attitude angle is determined by the relationship between the body coordinate system and the geographic coordinate system, and is represented by three Euler angles of heading angle , pitch angle and roll angle. Different rotation sequences will form different coordinate transformation matrices, usually in the order of heading angle, pitch angle and roll angle to represent the spatial rotation of the body coordinate system relative to the geographic coordinate system.
stray: Some factors lead to the phenomenon that the voltage of the output terminal of the circuit deviates from the original fixed value and drifts up and down. It is also referred to as zero drift.
ROS coordinate system: Please refer to ROS coordinate system - CSDN
Angular Accuracy: Please refer toWhat is the accuracy in the inclination sensor? - CSDN
Related | Reference Links
The following links are for reference only
Inertial Navigation System - Alchetron, The Free Social Encyclopedia
Inertial sensor - Alchetron, The Free Social Encyclopedia
IMU (Inertial Measurement Unit) - Alchetron, The Free Social Encyclopedia
Three-axis gyroscope - Alchetron, The Free Social Encyclopedia
Accelerometer - Alchetron, The Free Social Encyclopedia
Magnetometer - Alchetron, The Free Social Encyclopedia
Magnetometer - Alchetron, The Free Social Encyclopedia
Barometer - Alchetron, The Free Social Encyclopedia
Kalman filter - Alchetron, The Free Social Encyclopedia
All attitude angle - Alchetron, The Free Social Encyclopedia
Euler Angle/Attitude Angle - Alchetron, The Free Social Encyclopedia
Aeronautical order Euler angles - Alchetron, The Free Social Encyclopedia
Four elements - Alchetron, The Free Social Encyclopedia
Zero drift - Alchetron, The Free Social Encyclopedia
Detailed explanation of IMU principle and attitude fusion algorithm - CSDN
Analysis of 6-axis data fusion algorithm of accelerometer gyroscope bzdww
What is the accuracy in the inclination sensor - CSDN
Common selection problems
The A9 is the best performing one, and comes with an anti-magnetic field interference algorithm that has been independently developed for many years.
The magnetic field interference in the environment where the IMU is used is large, and the magnetic field interference is unstable.
It is recommended to choose A9. The module will collect the surrounding magnetic field data for initialization before power-on. There is an anti-magnetic interference algorithm inside, which can effectively resist the sudden change of magnetic field during the movement.
The use environment of the IMU is complex, and the vibration during use is large
It is recommended to choose A9. This module uses a 9-axis fusion algorithm and a self-developed filtering algorithm. The accumulated error will be smaller due to the fusion of the magnetic field
B9 can also be selected, this module uses a 6-axis fusion algorithm, and the accumulated error is large. Users need to study the fusion of magnetic fields by themselves, and we do not provide related help for fusion magnetic fields.
The IMU is used in a mild environment, and there is no major shaking during use
Option to use any IMU
Purchase notice
- Our IMU module is mainly used in ROS, and the code is written in python, and only code written in python.
- Provide protocol documents, users can write drivers in other languages according to their own needs.
- The UI interface data printing demo and data printing demo provided under window and linux (no need to rely on ROS) are for user reference
A9 model
- 9-axis IMU.
- 9-axis fusion algorithm.
- Independent research and development of filtering algorithms.
- Independent research and development of anti-magnetic interference algorithm, effectively prevent the interference of magnetic fields. It takes effect after the power-on initialization is successful.
- Output frequency 150 Hz.
- When the yaw value is 0, the x-axis will point north.
- After power-on, it will take about 10 seconds to initialize. During this period, the surrounding magnetic field data will be initialized into the module, so it may not point to the true north, and it has a certain relationship with the magnetic field of the environment where the module is located.
- The IMU module needs static startup, otherwise the module will automatically switch to dynamic startup, and the zero drift will use the stored value in the flash, and generally there will be a large deviation.
- Static accuracy 0.1 Dynamic accuracy 0.5
B9 Model
- 9-axis IMU
- 9-axis fusion algorithm
- Kalman filter algorithm
- Output frequency 200 Hz
- After the static start, the yaw, pitch, and roll of the current IMU module attitude will be initialized to zero, and the coordinate system will be established with the current x, y, and z axes of the module.
- Provides magnetometer output, but does not provide magnetometer fusion
- Static accuracy 0.7 Dynamic accuracy 2.5
B6 Model
- 6-axis IMU
- 6-axis fusion algorithm
- Kalman filter algorithm
- Output frequency 200 Hz
- After the static start, the yaw, pitch, roll of the current IMU module attitude will be initialized to zero, and the coordinate system will be established with the current x, y, and z axes of the module.
- Static accuracy 0.7 Dynamic accuracy 2.5
other
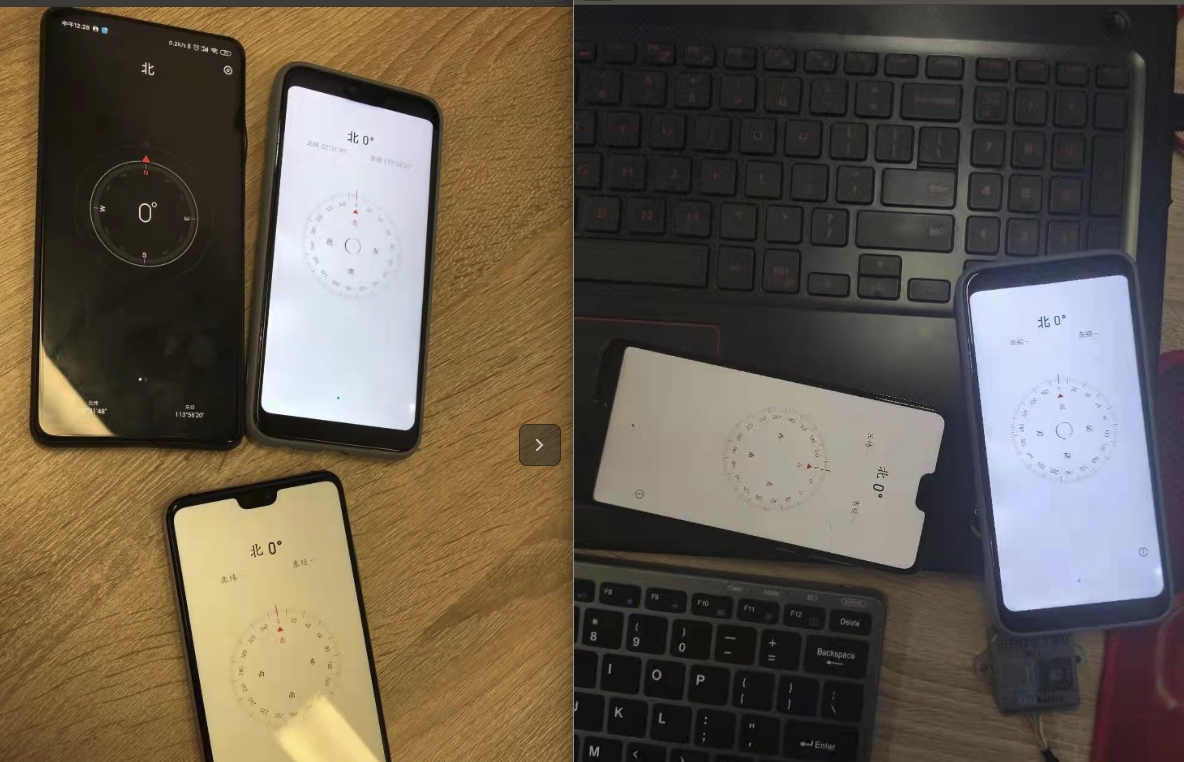
For the A9 model IMU module, when the yaw value is zero, the x-axis should point north. However, after the module is powered on, it will take about 10 seconds to initialize. During this period, the surrounding magnetic field data will be initialized into the module, so it does not necessarily point to the true north, which has a certain relationship with the magnetic field of the environment where the module is located. Users are also requested not to use the compass of the mobile phone for reference, which may not be accurate. The comparison of the compasses of different mobile phones is shown below.
If the deviation is too much, please make sure the reference point is correct, try to power off, rest the module, and then connect the USB test. (A9 module only)
Detect the output of the three-axis acceleration, the three-axis angular velocity, the three-axis magnetometer (A9 and B9 need to check the magnetometer), and whether the three-axis Euler angle data is output.
If it is impossible to determine whether it is a problem with the module or some dependencies of the code are not installed successfully and the data is not output, please refer to the following tutorial to quickly determine whether the data output by the module is incorrect through the serial port assistant.