ROS driver and visualization
Take ubuntu16.04, a9, python2.7 as an example
Don't insert the USB of the IMU first, enter
ls /dev/ttyUSB*in the terminal to check, then insert the USB into the computer, and then enterls /dev/ttyUSB*in the terminal to check, the extra The ttyUSB device is the serial port of the IMU.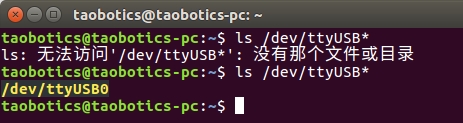
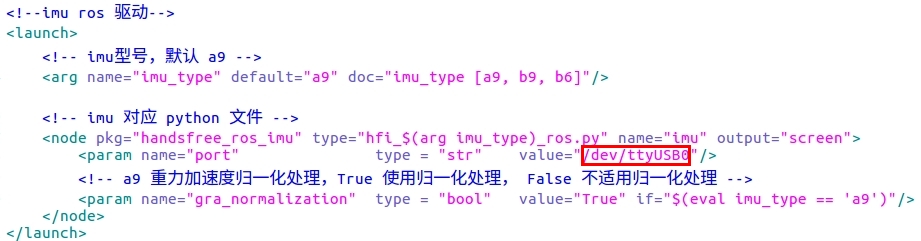
Enter the script directory and modify /dev/ttyUSB0 in the corresponding launch file (the default script uses /dev/ttyUSB0) to the number recognized by your computer
Open the terminal, run the imu driver,
imu_type:=** is the corresponding model, you can choose [a9, b9, b6]roslaunch handsfree_ros_imu handsfree_imu.launch imu_type:=a9Open two new terminals and enter the following two lines of commands respectively
rostopic echo /handsfree/imu rostopic echo /handsfree/magAs shown in the figure below, the information output by
rostop echoafter the driver runs successfully
Similarly, if you need to run other launch files, you need to make sure that the /dev/ttyUSB device in the launch file is modified correctly.
Description of relevant documents
- display_and_imu.launch, open the IMU driver node and the visual model written in visual. (Only supports ubuntu 16.04)
- handsfree_imu.launch, opens the node to drive with the IMU.
- rviz_and_imu.launch, open IMU driver node and Rviz visualization.
- view_display.launch, open the visual model written in visual alone.
- view_rviz.launch, opens the Rviz visualization alone.