Questions and Answers
summary of a problem
General Questions
Do I need to calibrate the IMU module after getting it?
Our IMU modules are nearly calibrated before leaving the factory and can be used directly. The module has done a relatively complete routine calibration of the gyroscope, accelerometer and magnetometer under a single temperature condition before leaving the factory, and the latter two are calibrated by relative quantities. The gyroscope has an additional zero calibration attached.
The communication cable with the IMU module is too short, what should I do if I need a longer cable?
You can purchase a suitable length of USB extension cable on the market to extend.
How to quickly confirm whether the communication of the IMU module is normal?
It can be quickly confirmed through the serial port assistant, please refer to the serial port assistant test communication in the appendix to test it.
I want to modify some configurations of the IMU module, such as baud rate, output frequency, etc. Can I modify it?
The current IMU module does not support users to modify the baud rate, output frequency and other related configurations, and can be customized for bulk purchases.
What should I do if the IMU moves a little and the program has no data output?
It may be caused by poor contact at one end of the IMU communication cable. Check the USB port first, then change the USB port to test. If it still doesn't work, re-plug and unplug the communication cable on the IMU side. (Please test several times to confirm.) If it is determined to be a problem with the cable, please contact the after-sales service to issue a replacement cable. (The quality of the IMU communication line and whether the contact is good or not are detected when the product is shipped. Generally, this problem does not occur.)
Do you have any 3D model examples?
Yes, but only the 3D model file with the suffix .STEP, in a certain directory, please find it by yourself.
Is there a communication protocol?
Yes, in a certain directory, please find it yourself.
Can the output of the module go directly to the bare metal?
Only provides USB serial output
About the initial value of yaw?
The initialization of the a series IMU module will initialize the north to the magnetic north of the module location, not the magnetic north (because there is magnetic interference in most cases), the magnetic north is to put a compass there, the direction of the compass pointing north, that is The direction of the magnetic field lines here is the direction of the vector sum of the earth's magnetic field and the interference magnetic field. The b-series IMU module initializes the yaw value to zero in a stationary attitude before powering up
The initial attitude of b9 seems to be 0 each time, rather than the attitude relative to the northeast sky. I want to directly figure out how to do ARHS?
b9 does not integrate the magnetometer, but only provides the output information of the magnetometer, and the user needs to perform the fusion processing by himself.
Does the angle output calculation process take into account the geomagnetism?
The a9 has geomagnetic fusion processing and anti-magnetic interference. The output of the angle has been calculated and can be ignored. b-series angle output calculations do not take into account geomagnetism
Does the angular velocity filter have fusion geomagnetism?
no
Static and dynamic accuracy?
Static accuracy: Static accuracy means that the module turns to an angle and then stops to measure. In addition, in our own definition, it is expanded to include the measurement when the turntable rotates slowly in three dimensions on a three-axis turntable. Static measurement is measured with a three-axis turntable. Dynamic Accuracy: Dynamic accuracy includes both dynamic rotation and real-time measurements when lateral acceleration is applied. The dynamic measurement uses a rocking table or a high-precision imu (such as an optical fiber) as a reference for comparison measurements in actual working conditions. A9 Static accuracy 0.1 Dynamic accuracy 0.5 B9 Static accuracy 0.7 Dynamic accuracy 2.5 b9 The initial attitude seems to be 0 each time, not the attitude relative to the northeast sky. I want to directly get the ARHS how to do it?
b9 does not integrate the magnetometer, but only provides the output information of the magnetometer, and the user needs to perform the fusion processing by himself.
Does the angle output calculation process take into account the geomagnetism?
The a9 has geomagnetic fusion processing and anti-magnetic interference. The output of the angle has been calculated and can be ignored. b-series angle output calculations do not take into account geomagnetism
Does the angular velocity filter have fusion geomagnetism?
no
Static and dynamic accuracy?
Static accuracy: Static accuracy means that the module turns to an angle and then stops to measure. In addition, in our own definition, it is expanded to include the measurement when the turntable rotates slowly in three dimensions on a three-axis turntable. Static measurement is measured with a three-axis turntable. Dynamic Accuracy: Dynamic accuracy includes both dynamic rotation and real-time measurements when lateral acceleration is applied. The dynamic measurement uses a rocking table or a high-precision imu (such as an optical fiber) as a reference for comparison measurements in actual working conditions. A9 Static accuracy 0.1 Dynamic accuracy 0.5 B9 Static accuracy 0.7 Dynamic accuracy 2.5
Is the IMU a northeast celestial coordinate system?
The coordinate system of the IMU is the default coordinate system of ros, without considering the northeast land/northeast sky, the data obtained by the IMU is no problem, it can be slightly modified in the code to achieve the required data output rules.
The acceleration of the x, y, and z axes is not right. I put it on the desktop at rest, and the acceleration of the x and y axes is not zero.
The module can't be absolutely level, resting on a relatively flat desktop, the acceleration of the x and y axes will be around 0.0, and the acceleration of the z axis will be around 9.8.
Assuming the current value of the magnetometer x-axis is a, if it is rotated 180 degrees in the horizontal plane, should it be equal to -a?
In the absence of magnetic interference in the environment, this is the case.
Why does the z-axis change greatly after I rotate the y-axis to 90 degrees?
The angle is calculated from the components of each axis of the acceleration. When it is close to 90 degrees, the denominator is 0, and it enters the singularity.
When Euler angles represent attitude, there will be a singularity phenomenon. The position of the singularity is related to the rotation order of Euler angles. For example, the rotation order of Euler angles is defined as Z-Y-X, then the Y axis ±90° is the singularity position. If the rotation order is defined as Z-X-Y, then the X axis ±90° is the singularity position. Our modules are defined as Z-Y-X. It can be understood that the Z axis represents the direction angle, which is equivalent to the X axis orientation. When the Y-axis is 90 degrees and the X is facing upwards, the Z-axis is the same attitude represented by any angle, which is meaningless. Also, assume that the X-axis is 0 degrees and the Z-axis is 0 degrees. When the Y-axis changes from 89° to 91°, the posture will change from [0, 89, 0], [180, 91, 180], and the X-axis angle has a sudden change of 0~180°, and the Z-axis has also changed abruptly.
This is consistent with the behavior of the aircraft instrument. For example, in flight simulation software/games, when the aircraft is pulled up to a position close to 90 degrees, the heading will shake.
The z-axis angle is the magnetic north angle? Or does the function correct to the Earth's North Pole angle?
Magnetic North Pole (Magnetic North Pole).
How often does this device have accumulated errors?
The cumulative error of the IMU is accumulated over time, and the cumulative error is different in different usage environments.
Has the data sent by the IMU been processed by Kalman filtering?
The b series uses Kalman filter, and the a series uses self-developed filter to process.
What is the geometric size of this IMU?
Yes, in a certain directory, it is a picture file
After a9 is powered on, yaw is inaccurate and does not point to true north.
Before the module is powered on, the surrounding magnetic field data will be collected. It does not necessarily point to the true north, and there will be deviations. The deviation is generally related to the surrounding magnetic field or the module does not start statically. Make sure that there is nothing around the module that can interfere with the magnetic field, and the module remains stationary (you can press it with a book), then connect the usb cable to the computer, be careful not to drive the module when connecting to the computer, and then test it.
It should be noted that if true north is measured by sensors on other devices, it is not a reference, such as mobile phones, and in some cases, its pointing will have a great deviation.
Is there any information about the working principle of this IMU?
No, the working principles of IMUs are mostly the same, and relevant information can be found on the Internet.
Do you have the circuit diagram of the IMU?
No.
After the A9 module is powered on, what is the problem of using the serial port tool to check the abnormal data?
After the A9 module is powered on, it will take a few seconds to initialize. After the initialization is completed, the data will be displayed normally.
According to the official ros installation tutorial, there is a problem, apt cannot install the corresponding package?
It may be that this package is not in the local apt source, so please Google the source change tutorial by yourself, and try to install it after replacing the local apt source.
What is the problem of Import: No model named serial when running after pip installs serial?
Please check whether the python version of the local pip is the same as the python version of the running code. For the specific check tutorial, please Google it yourself.
What is the problem of yaw drifting after IMU is powered on?
It may be caused by the unstable power supply of the USB port of the machine. Please replace the carrier device for testing or provide a separate power supply for the IMU, such as using a USB docking station with a separate power supply.
Issues under Linux & ROS
Do you have a fusion case for your IMU?
We don't have any IMU-related integration cases yet. You can find relevant case studies on the Internet.
Why do you have to re-authorize ttyUSB* every time ros starts?
Try the following command to see if it works
sudo touch /etc/udev/rules.d/handsfree-IMU.rules sudo sh -c 'echo "KERNEL==\"ttyUSB*\",GROUP=\"uucp\",MODE=\"0777\"" >> /etc/udev/rules.d/handsfree-IMU.rules' sudo service udev reload sudo service udev restart sudo usermod -a -G dialout $USERDoes this IMU have a routine for moving path calculation?
no
How to synchronize the time between IMU and other sensors?
You can start with the ros timestamp, you need to check the relevant information online.
Is there an example of using this IMU and odometer for fusion? I tried it myself, and often reported errors. Couldn't find a solution online either.
Not yet
Unable to install dependencies
All dependencies can be installed. Please check whether your source is correct. You can refer to the online tutorial to check the settings.
Is there a way to fix the ttyUSB corresponding to the IMU? I have several serial ports, and it often gets messed up every time I restart?
You can try to change the usb rules
Issues under Windows
How do I know if my python is installed successfully?
You can refer to the online tutorial and the tutorial on how to verify the installation is successful.
About the pip installation command will fail, what is the cause?
You may need to upgrade pip at the command line prompt, or add pip's environment.
How to ask questions
How to ask questions through Issues
Go to Issues page
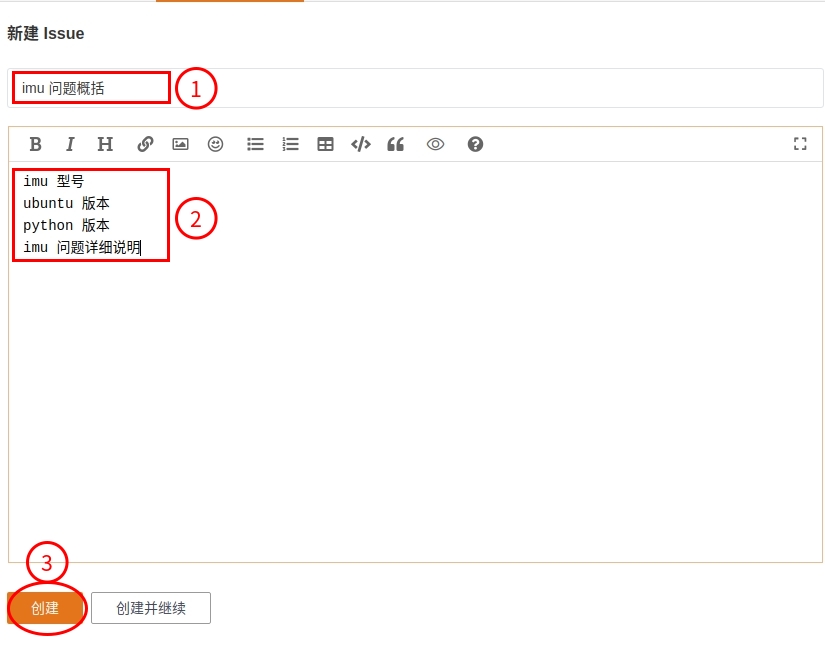
Create an issue and select New Issue

Post a question, please follow the format in the picture, thank you
Please wait for the answer, we will deal with your question as soon as possible, and you can browse other articles during the waiting process.
Question Answer Instructions
- Some questions that are unclear or difficult to describe may cause the answerer to be unable to answer quickly. Please describe the problem as clearly as possible.
- We only provide answers for related IMU modules, such as problems in operation, problems in output data, etc.
- You can also ask complex questions that we won't necessarily answer. Maybe you can wait for users who are in the same direction as your research to discuss.
- iessu of the nature of suggestion can be given, we will humbly accept the suggestion and improve our function package.
Knowledge Base and Reference Links
noun description
IMU: Abbreviation for Inertial Measurement Unit, which is Inertial Measurement Unit.
Magnetic North: Magnetic North is the point on the Earth's surface where the Earth's magnetic field is directed vertically downward. The magnetic north pole is not the same as the geographic north pole. The magnetic north pole is constantly changing, moving at a rate of 20.5 meters per day. In addition, since the earth's magnetic field is not completely symmetrical, the geomagnetic north pole and the geomagnetic south pole are not at the antipodal position.
Geographic North Pole: The North Pole refers to the northern end of the Earth's axis of rotation, that is, the point at 90° north latitude, which does not change with time.
unity: Unity is a real-time 3D interactive content creation and operation platform. All creators, including game development, art, architecture, automotive design, film and television, turn their ideas into reality with Unity. The Unity platform provides a complete set of software solutions for creating, operating and monetizing any real-time interactive 2D and 3D content, supporting platforms including mobile phones, tablets, PCs, game consoles, augmented reality and virtual reality devices.
Reference link
[1] IMU (Inertial Measurement Unit)--Wikipedia
[2] AHRS (Attitude Reference System) - Baidu Encyclopedia(There is difference between AHRS and imu)
[4] Magnetic North Pole--Wikipedia
[5] Magnetic North Pole--Wikipedia
[6] North Pole--Wikipedia(Geographic North Pole)