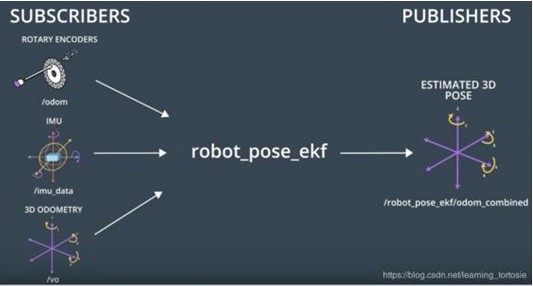
Odometer and IMU fusion
Through the robot kinematics solution, the measured motor motion data can be converted into odometer data. After the motor odometer integrates the data of the IMU yaw angle through the extended Kalman filter, the accuracy of the robot odometer can be greatly improved. Call it an inertial fusion odometer.
The weight information of the odometer can be determined by the slip collision detection module, which can judge whether slip and collision occur by detecting the current of the motor, the motor speed measured by the encoder, and the IMU data. If these situations occur, it means that the odometer will drift instantaneously. By reducing the weight of the odometer, the reliability of the positioning and navigation system can be guaranteed with a high probability.
Please wait for the update.