Supporting package installation
Install the package under Windows (no need to install ROS)
Take win7, python2.7 as an example
Install python2.7 and configure the relevant environment python environment and pip environment
Go to the official website to download python2.7 and install it. Download address: python2.7 download address (If you can't get in, you can download it through other channels)
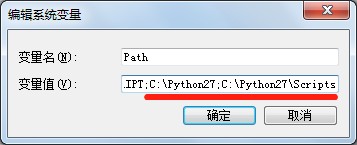
The above picture is an example, it is the directory where the default installed python is located, and the Scripts directory has the pip tool
Use the cmd command processor to detect whether python is successfully installed, and download the pyserial serial port module through pip
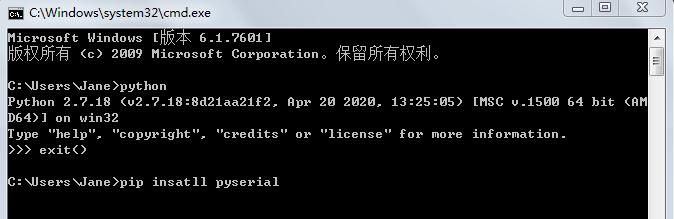
Take the above picture as an example, by entering python to check whether python2.7 is installed successfully. Type exit() to exit.
Then install the serial port module through pip install pyserial
Download and install the cp2102 serial port driver, download address: cp2102 driver (under normal circumstances, it will be downloaded automatically after the computer is plugged in the USB, you can judge it through step 5 first, if there is, skip this step)
Download the driver software package and extract it to the desktop.
Using the installation package under linux (no need to install ROS)
Take ubuntu16.04, python2.7 as an example
Download the driver software package, right-click and select Extract here.
Using the installation package under linux + ROS (requires ROS installed)
Install the ROS IMU dependencies, please run the corresponding command in the terminal
If you are using ubuntu 16.04, ROS kinetic, python2:
sudo apt-get install ros-kinetic-imu-tools ros-kinetic-rviz-imu-plugin sudo apt-get install python-visualIf you are using ubuntu 18.04, ROS Melodic, python2:
sudo apt-get install ros-melodic-imu-tools ros-melodic-rviz-imu-pluginIf you are using ubuntu 20.04, ROS Noetic, python3:
sudo apt-get install ros-noetic-imu-tools ros-noetic-rviz-imu-plugin pip3 install pyserialThe following takes the official installation as an example, you can also install it according to your own use.
sudo apt-get install git -y mkdir -p ~/handsfree/handsfree_ros_ws/src/ cd ~/handsfree/handsfree_ros_ws/src/ git clone -b new https://gitee.com/HANDS-FREE/handsfree_ros_imu.git cd ~/handsfree/handsfree_ros_ws/ catkin_make cd ~/handsfree/handsfree_ros_ws/src/handsfree_ros_imu/scripts/ sudo chmod 777 *.py echo "source ~/handsfree/handsfree_ros_ws/devel/setup.sh" >> ~/.bashrc source ~/.bashrc