一、硬件介绍
1.1、硬件介绍
硬件接口包括全功能 USB*1、显示器供电 USB*1、HDMI*1、充电口*1,详细说明如下图所示:

1.2、硬件连接示意图
用户收到顶升机构后,需自行装配显示器、天线,并连接显示器供电线及HDMI线,具体装配方式如下图所示:

二、软件介绍
- 系统环境:Ubuntu18.04
- ros版本: melodic
2.1、 发布控制数据
2.1.1、 控制话题及数据简介
控制话题:/handsfree/lift_control/control
数据类型:handsfree_lift_control/lift_control
数据发布频率:10Hz
数据定义如下所示:
```
int8 method:
# 0:直接控制顶升机构的升降(上升到最高位置,降低到最低位置)。
float64 value:
# 当method为0时,value为0,则顶升机构降到最低位置;value为1时,则顶升机构升到最高位置。
```
2.1.2、控制顶升机构
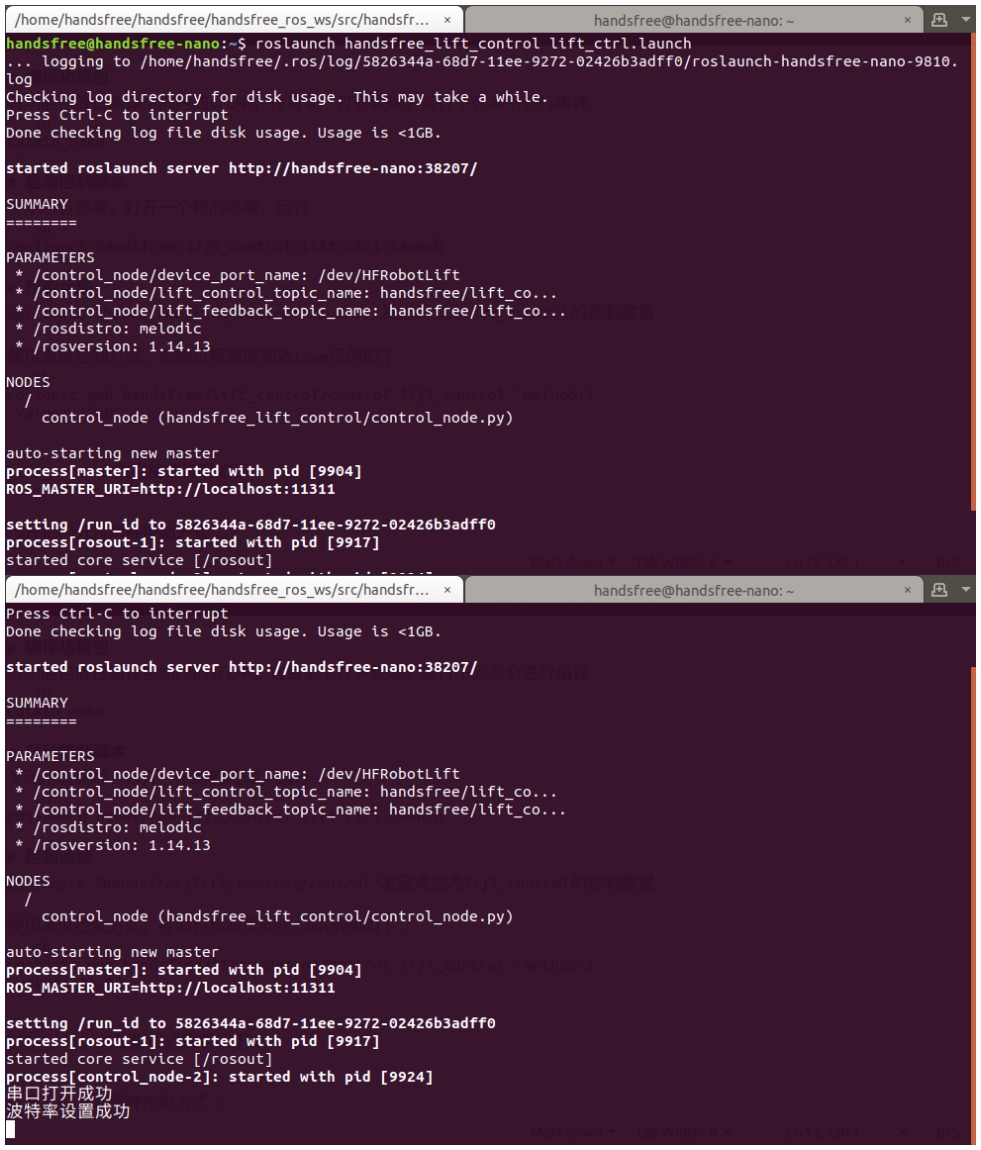
关闭所有终端,打开新终端(Ctrl+Alt+T),并输入如下指令,从而启动控制脚本
roslaunch handsfree_lift_control lift_ctrl.launch正常情况下,会显示:
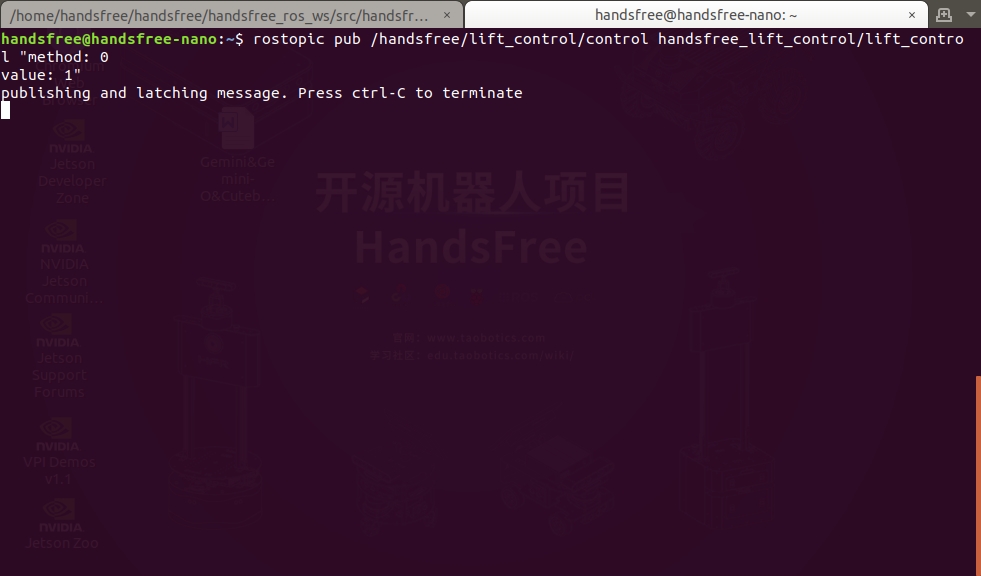
打开第二个终端(Ctrl+Alt+T或Ctrl+Shift+T),输入如下指令,可通过升降控制方式使顶升机构到达最高位置。
rostopic pub /handsfree/lift_control/control handsfree_lift_control/lift_control "method:0 value: 1"运行结果如下所示:
若想使顶升机构到达最低位置,则使用如下所示指令:
rostopic pub /handsfree/lift_control/control handsfree_lift_control/lift_control "method:0 value: 0"此时,会显示:

2.2、获取反馈数据
用户可通过 /handsfree/lift_control/feedback 话题获取顶升机构当前高度数据,数据类型为Float64,获取数据前需启动顶升机构控制脚本(参考2.1节内容)。
用户可通过如下指令获取顶升机构反馈数据:
rostopic echo /handsfree/lift_control/feedback
运行效果如下所示:
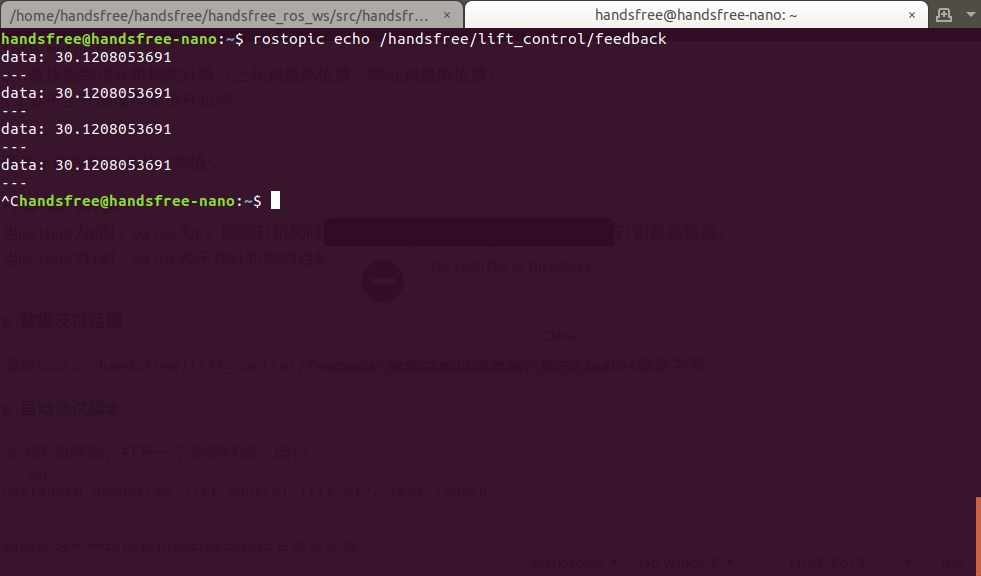
图中“deta: 30.1208053691”是顶升机构当前高度,单位毫米(mm)。
三、注意事项
1、 使用过程中,确保正常关闭运行的程序和终端,否则会导致资源未完全释放而报错。
2、 顶升机构最大负重为2.5kg。
3、 HDMI上的USB接口不具备通信功能,仅作为显示器供电接口使用。