1. Hardware introduction
1.1. Hardware introduction
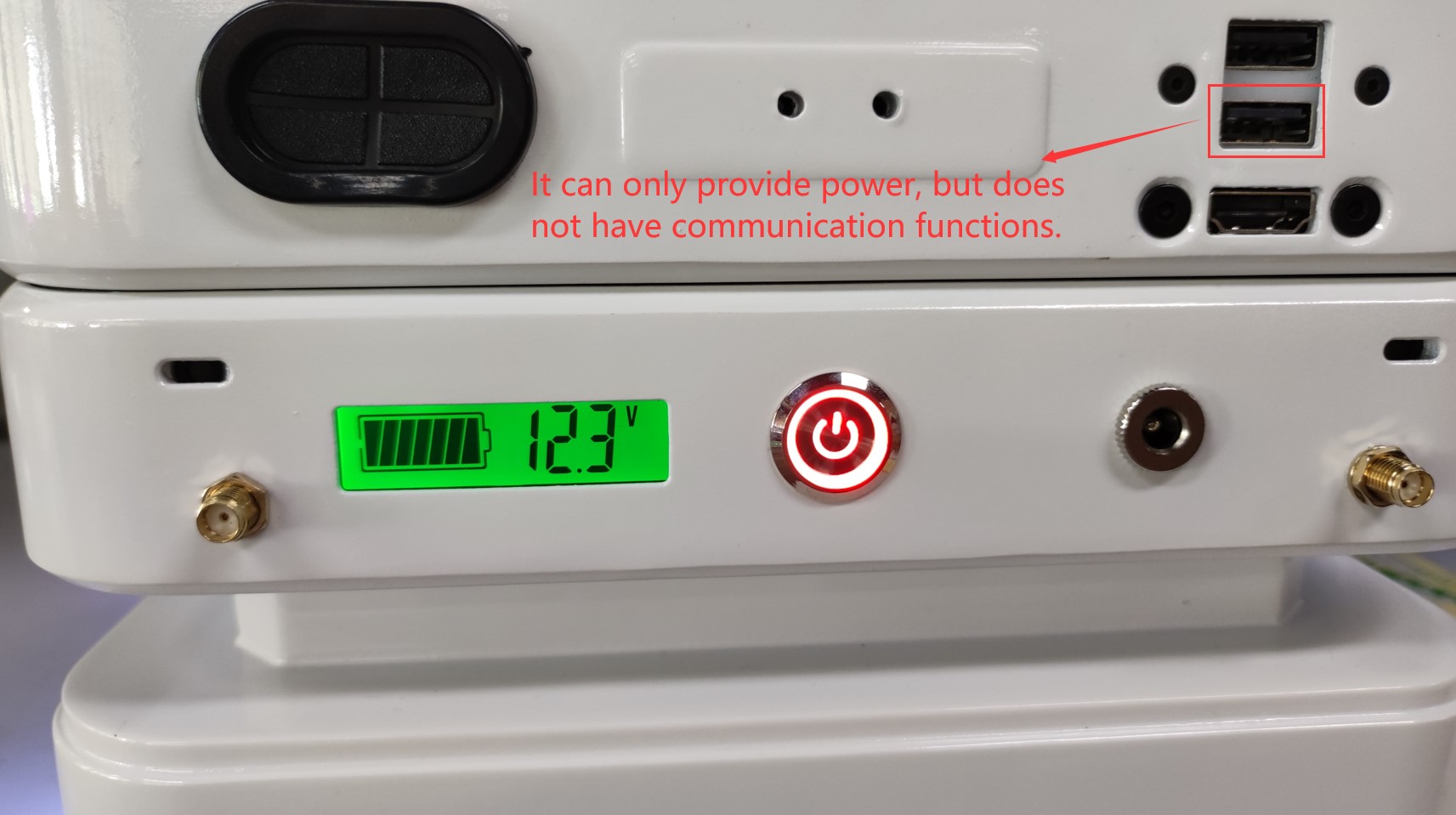
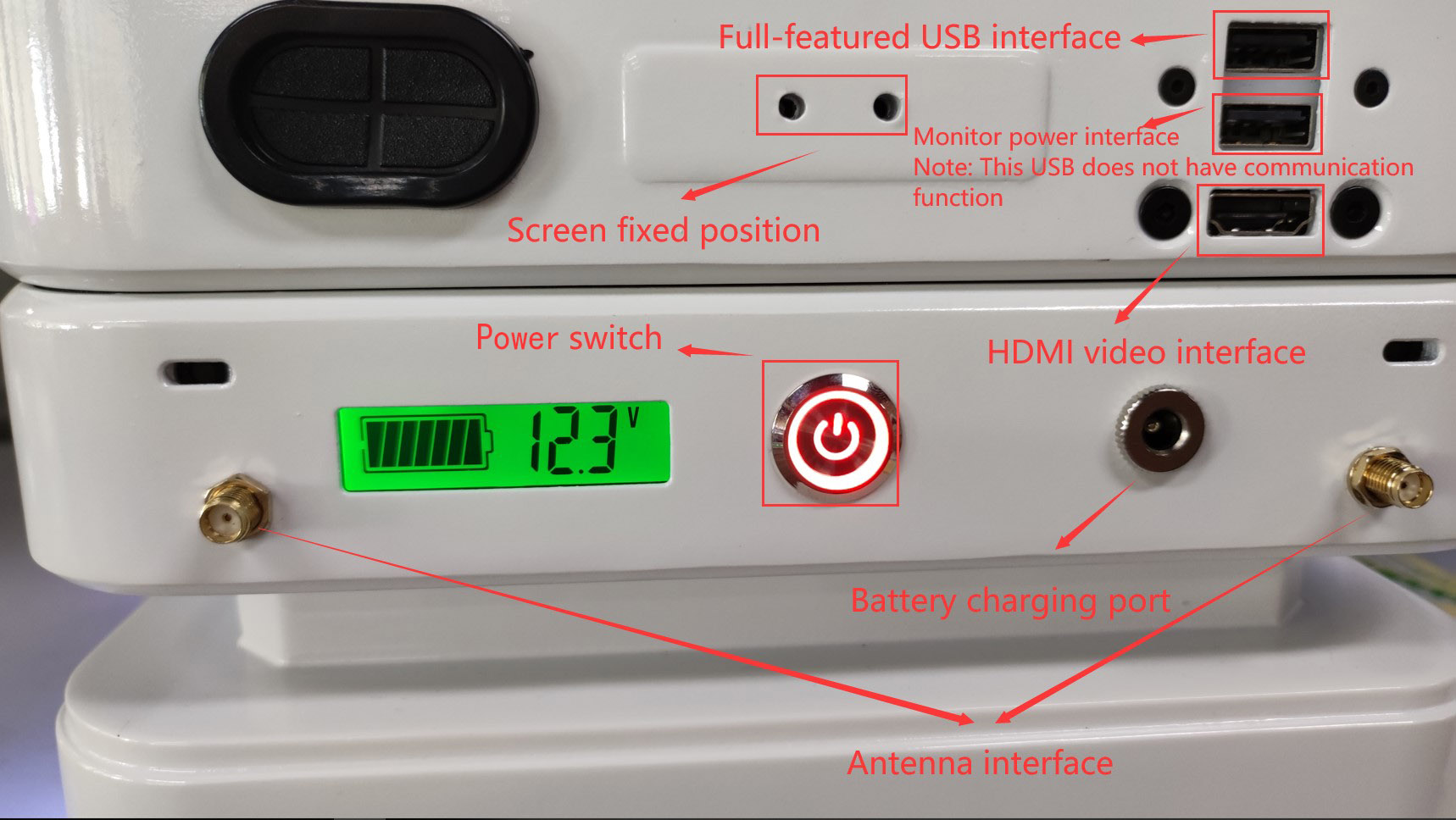
Hardware interfaces include full-function USB1, display power supply USB1, HDMI1, and charging port1. The detailed description is shown in the figure below:
1.2. Hardware connection diagram
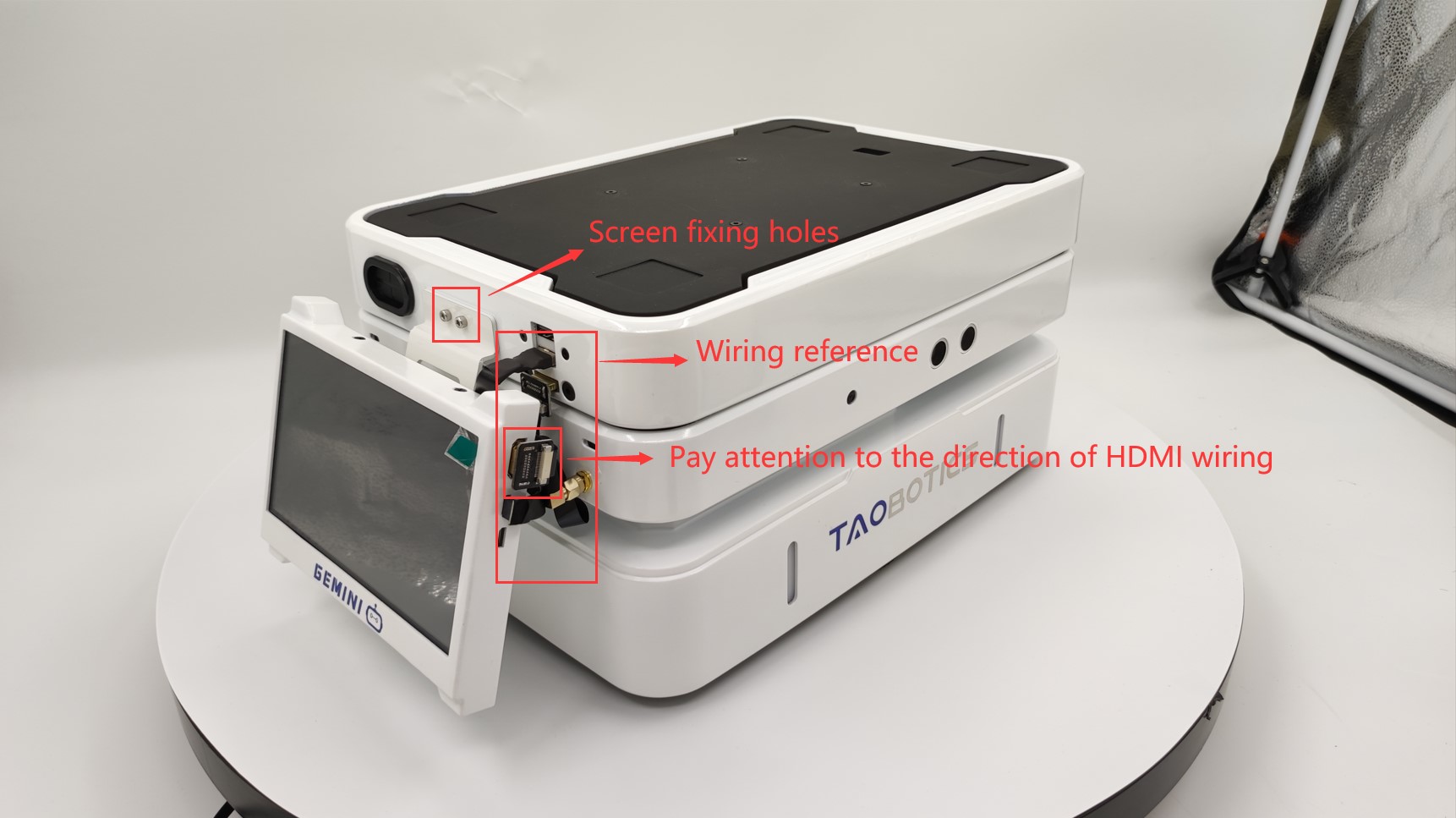
After receiving the lifting mechanism, the user needs to assemble the display and antenna by themselves, and connect the display power supply line and HDMI line. The specific assembly method is shown in the figure below:
2. Software introduction
- System environment: Ubuntu18.04
- ros version: melodic
2.1. Release control data
2.1.1. Introduction to control topics and data
Control topic: /handsfree/lift_control/control
Data type: handsfree_lift_control/lift_control
Data release frequency: 10Hz
The data definition is as follows:
```
int8 method:
# 0: Directly control the lifting of the jacking mechanism (rising to the highest position, lowering to the lowest position).
float64 value:
# When the method is 0 and the value is 0, the lifting mechanism drops to the lowest position; when the value is 1, the lifting mechanism rises to the highest position.
```
2.1.2. Lift control
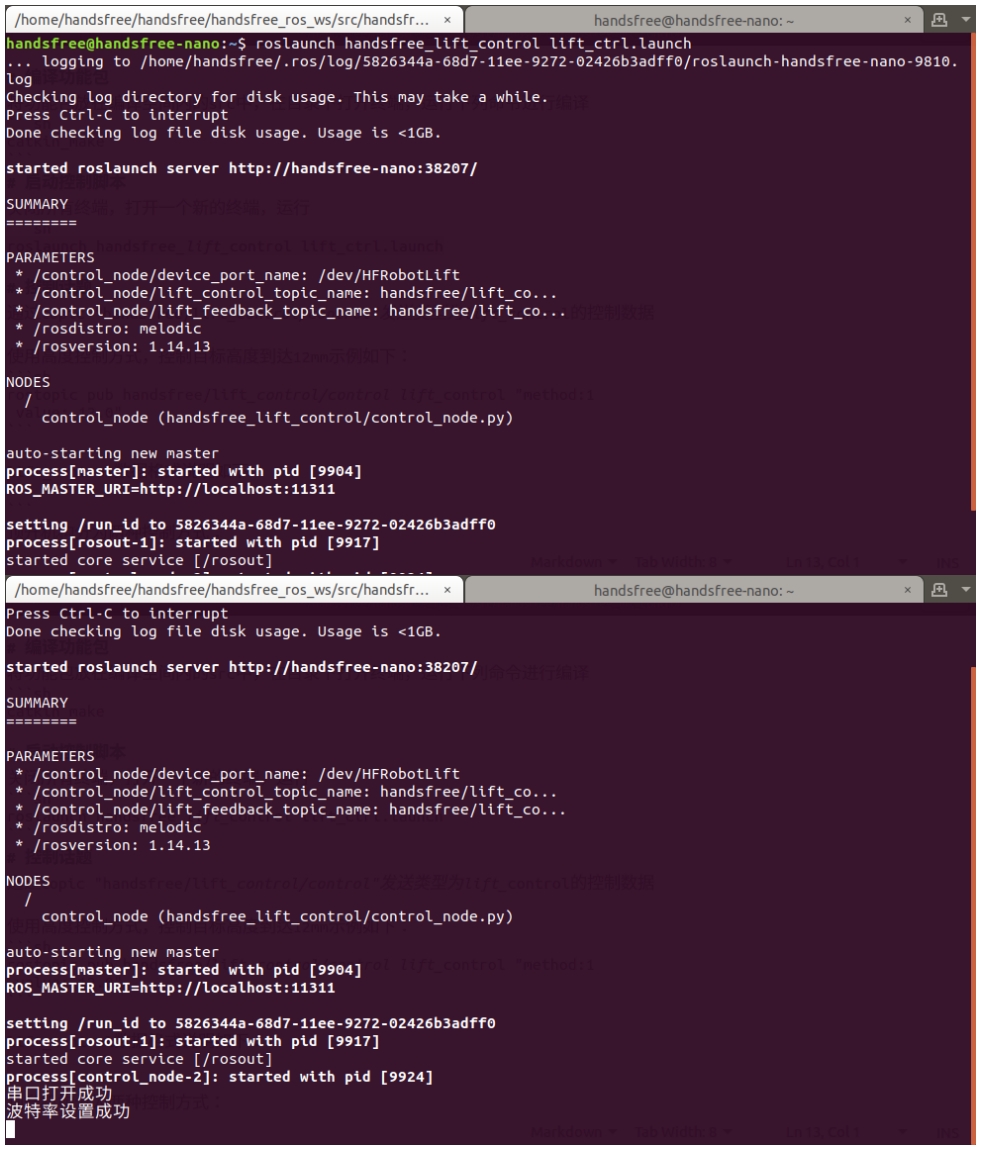
Close all terminals, open a new terminal (Ctrl+Alt+T), and enter the following command to start the control script
roslaunch handsfree_lift_control lift_ctrl.launchUnder normal circumstances, it will display:
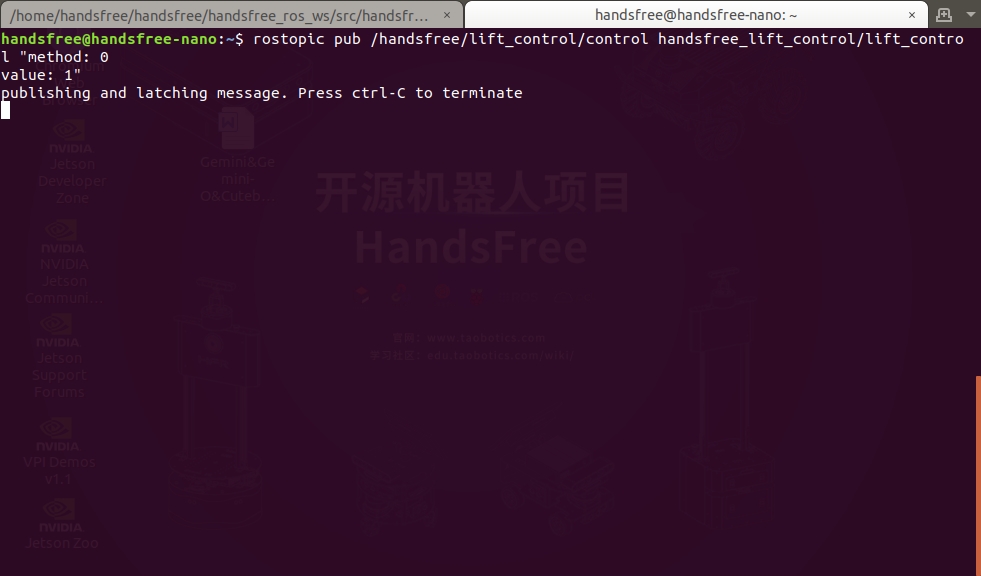
Open the second terminal (Ctrl+Alt+T or Ctrl+Shift+T) and enter the following command to make the lifting mechanism reach the highest position through lifting control.
rostopic pub /handsfree/lift_control/control handsfree_lift_control/lift_control "method:0 value: 1"The running results are as follows:
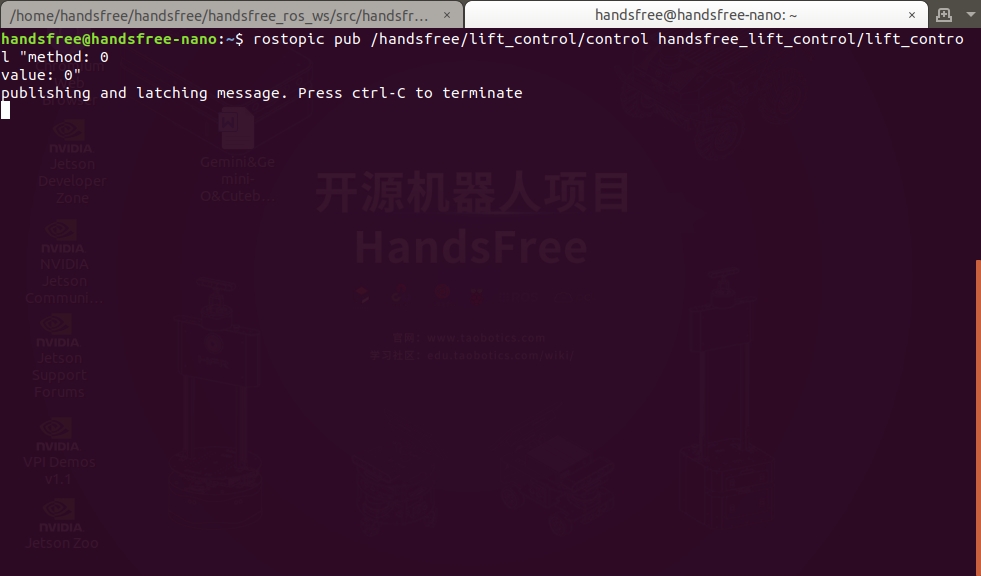
If you want the lifting mechanism to reach the lowest position, use the following command:
rostopic pub /handsfree/lift_control/control handsfree_lift_control/lift_control "method:0 value: 0"At this time, it will be displayed:
2.2. Obtain feedback data
Users can obtain the current height data of the lifting mechanism through the topic /handsfree/lift_control/feedback. The data type is Float64. Before obtaining the data, the lifting mechanism control script needs to be started (refer to Section 2.1).
Users can obtain the feedback data of the jacking mechanism through the following commands:
rostopic echo /handsfree/lift_control/feedback
The running effect is as follows:
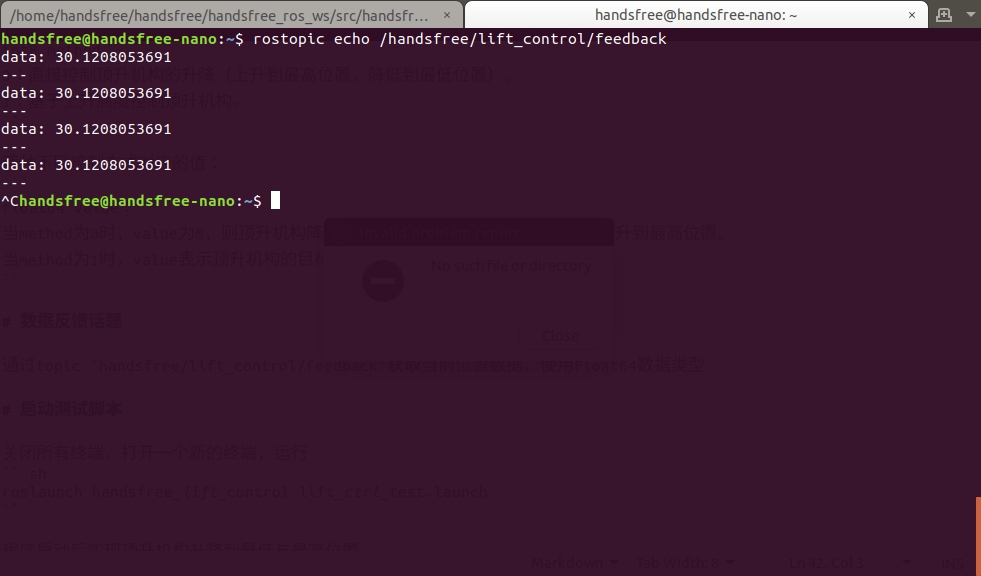
"deta: 30.1208053691" in the picture is the current height of the lifting mechanism, in millimeters (mm).
3. Precautions
During use, make sure to close running programs and terminals normally, otherwise resources will not be fully released and an error will be reported.
The maximum load of the lifting mechanism is 2.5kg.
The USB interface on HDMI does not have communication functions and is only used as a display power supply interface.