YDLidar用户手册
一.YDLidar-SDK驱动安装
在开始安装前,您需确认您的机器已经搭建好了最基础的ROS环境
YDLidar-SDK 需要 CMake 2.8.2+ 作为依赖项,您可以使用 apt 安装这些软件包:
sudo apt install cmake pkg-config
安装好CMake等依赖项后,则运行以下命令来下载并编译YDLidar-SDK驱动包:
git clone https://github.com/YDLIDAR/YDLidar-SDK.git
mkdir -p ~/YDLidar-SDK/build
cd YDLidar-SDK/build
cmake ..
make
sudo make install
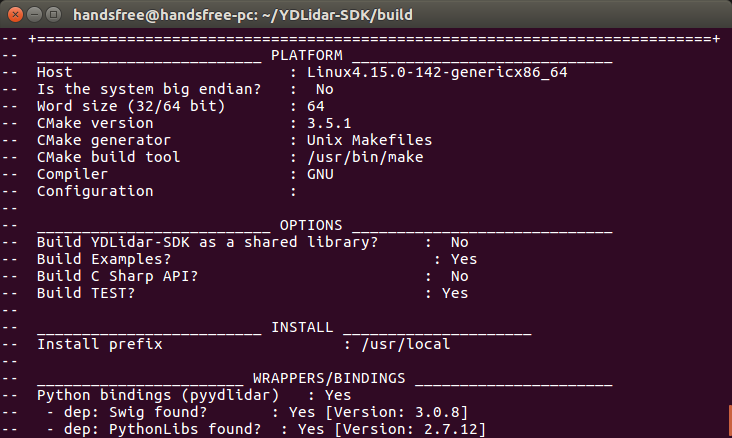
如果没有发生错误,您的机器终端会显示如下内容:
编译完YDLidar-SDK驱动后,您还需要将其包装:
cd ~/YDLidar-SDK/build
cpack
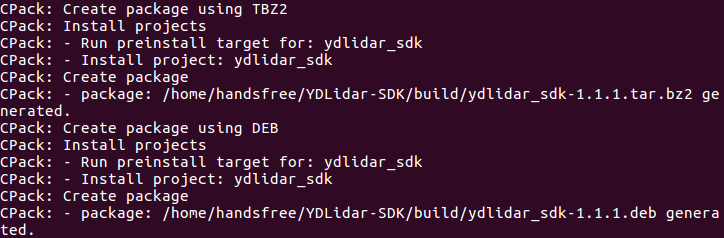
包装完后,您可以通过以下方式检测YDLidar-SDK驱动是否安装成功:
cd ~/YDLidar-SDK/build
./tri_test
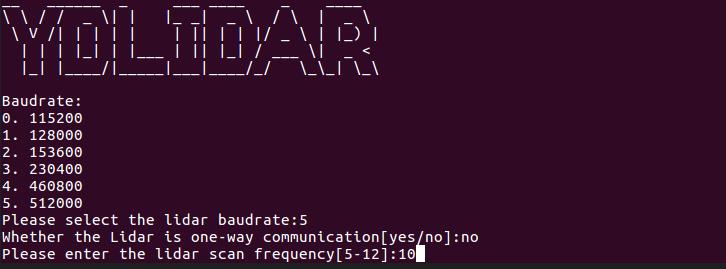
如果流程正确且过程没有错误发生,则会得到如下内容:
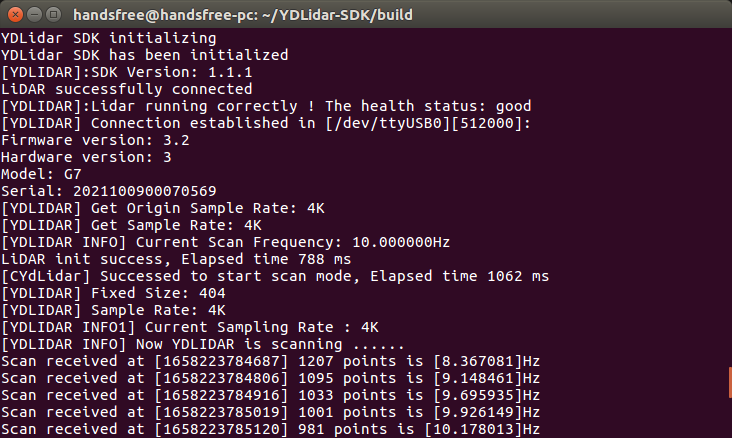
当您输入完运行参数后,YDLidar就会开始工作并打印出信息:
至此,YDLidar-SDK驱动安装完毕
二.YDLidar-ros功能包安装
在此过程之前,您需要确保您的机器已经搭建好了最基础的ROS环境
首先,您需要创建一个存放该功能包的工作空间:
mkdir -p ~/ydlidar_ws/src
cd ~/ydlidar_ws/src
catkin_init_workspace
随后将功能包下载到该工作空间中,并进行编译
git clone https://github.com/YDLIDAR/ydlidar_ros_driver.git
cd ydlidar_ws
catkin_make
当然,还需要把这个工作空间添加
echo "source ~/ydlidar_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
到这里,您就已经安装完了YDLidar-SDK驱动和YDLidar-ros功能包,下面是ros功能包的运行方式:
注意:完成上一操作后,请再次重新插入激光雷达。
连接激光雷达。
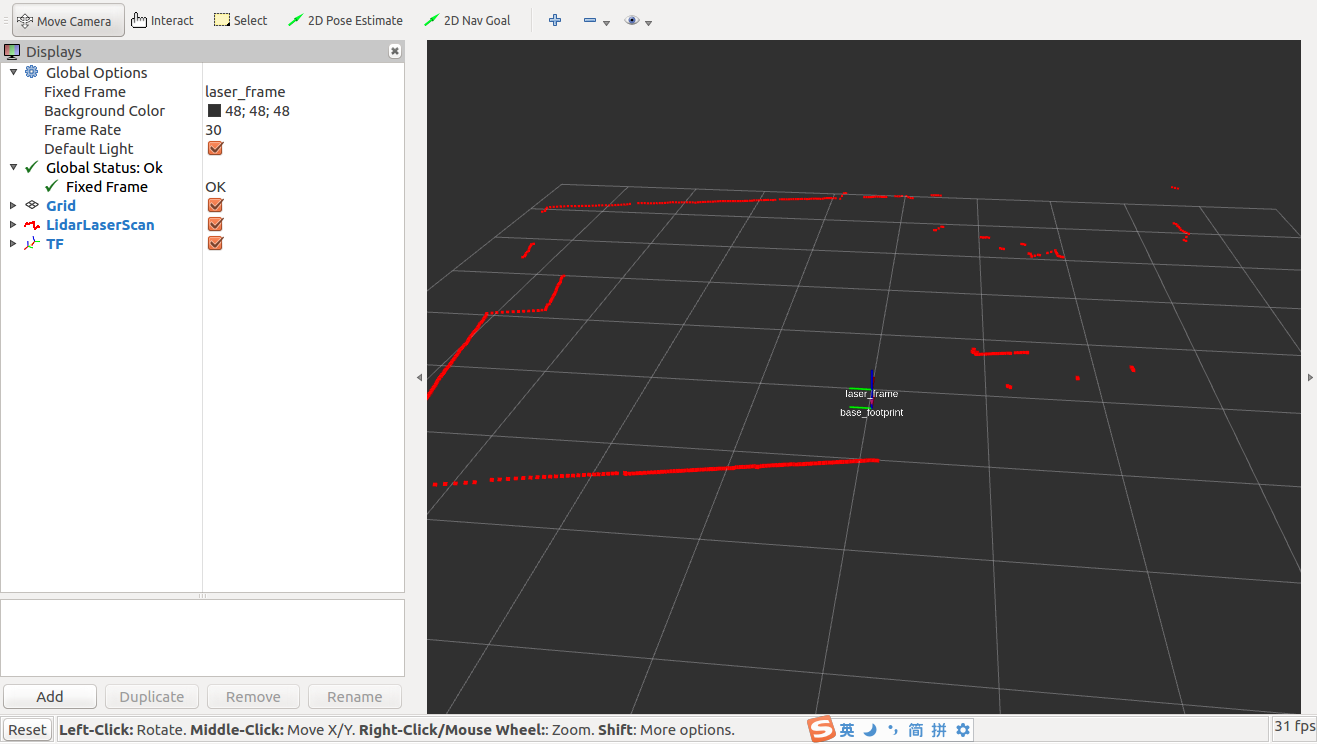
roslaunch ydlidar_ros_driver lidar_view.launch
若您成功连接了激光雷达,则会得到如下界面:
如果没有出现上述界面,则可能在安装过程中出现了未知错误,需要重新运行出错界面以上流程的命令
相关驱动包github网站
YDLidar-SDK驱动: https://github.com/YDLIDAR/YDLidar-SDK.git
YDLidar-ROS驱动: https://github.com/YDLIDAR/ydlidar_ros_driver.git