RPLidar用户手册
一、ROS_SDK的安装
在开始安装前,您需确认您的机器已经搭建好了最基础的ROS环境
首先,您需要创建一个存放ros功能包的空间:
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/
catkin_make
export ROS_PACKAGE_PATH=$ROS_PACKAGE_PATH:~/catkin_ws/src
source ~/catkin_ws/devel/setup.bash
然后,将源代码克隆到您的工作空间中,并将其编译
cd ~/catkin_ws/src
git clone https://github.com/robopeak/rplidar_ros.git
cd ..
catkin_make
至此,ROS_SDK安装完毕
二、ROS_SDK的使用
完成安装的步骤后,您还需对挂载设备进行固定名称映射才能稳定使用,因为在官方A1/A3雷达的启动文件中,默认A1/A3雷达是接在电脑/dev/ttyUSB0上,一般情况下是没有问题的,但是偶尔也出现A1/A3雷达的实际接口并没有挂载在/dev/ttyUSB0,而是在/dev/ttyUSB1或者其他设备接口上。这个也没有办法完全保证,每次都是随机挂载的。解决方法可以直接去启动文件中修改/dev/ttyUSB0,将它修改成你电脑实际挂载雷达的接口设备,可能是/dev/ttyUSB1或者/dev/ttyUSB2,所以我们根据硬件ID来创建一个rules文件,使得硬件ID和固定的挂载接口名称形成固定映射,这样就无需每次启动都要手动更改接口名
cd catkin_ws/src/rplidar_ros/scripts
./create_udev_rules.sh
注意:运行接触完后,我们需要重新插拔A1/A3的雷达,才能生效
官方的launch启动文件默认的是设备挂载接口是/dev/ttyUSB0,您还需要将这个ttyUSB0修改成为.rules文件中映射后的名称rplidar
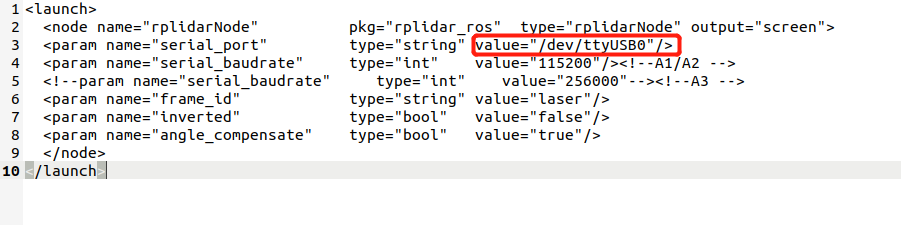
A1型雷达启动文件更改方法
cd catkin_ws/src/rplidar_ros/launch
gedit rplidar.launch
将其中的设备参数修改成/dev/rplidar
A3型雷达启动文件更改方法
cd catkin_ws/src/rplidar_ros/launch
gedit rplidar_a3.launch
将其中的设备参数修改成/dev/rplidar
然后您就可以通过roslaunch rplidar_ros xxx.launch命令来启动雷达驱动
roslaunch rplidar_ros view_rplidar.launch # for rplidar A1
roslaunch rplidar_ros view_rplidar_a3.launch # for rplidar A3
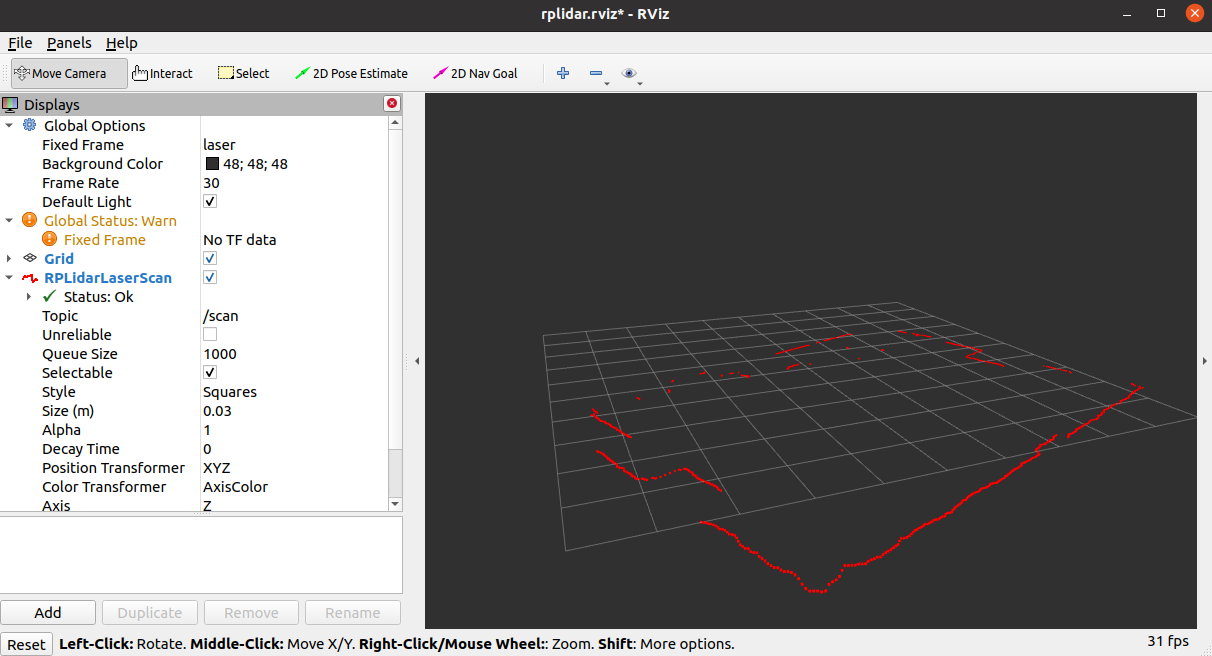
若上述步骤准确无误,则可以得到如下的rviz界面
相关驱动包github网站
ROS_SDK驱动: https://github.com/robopeak/rplidar_ros.git