Giraffe User Manual

1 Product Introduction
HandsFree Giraffe intelligent composite robot inherits the lineage of HandsFree robot series with high generalization and high expansion. Support more than ten mainstream lidars such as SLAMTEC and Hokuyo, support computing platforms such as industrial computer, TK1, TX1/2, Upboard, Raspberry Pi, etc., support Xtion1/2, Kinect1/2, ZED Stereo Camera and other mainstream cameras, software The system is perfectly adapted to ROS's Movelt, TF, Navigation and other subsystems. In addition, the sturdy and highly reliable structural design enables Giraffe to support HandsFree large robotic arms and UR3/5 robotic arms to meet the task requirements of more service robots.
2 Package Contents
The list of Giraffe high-end shipments is as follows, the following list is for reference only
| No. | Name | Image | Quantity |
|---|---|---|---|
| 1 | Giraffe Robot Body |  |
x1 |
| 2 | Battery Charger (25.2V/3A) |  |
x1 |
| 3 | PS3 controller remote control |  |
x1 |
| 4 | Depth Camera |  |
x1 |
| 5 | Mouse and Keyboard |  |
x1 |
| 6 | Tools Kit |  |
x1 |
| 7 | Experiment Manual |  |
x1 |
| 8 | Equipment Warranty Card / Service Manual |  |
x1 |
| 9 | Equipment factory test sheet | 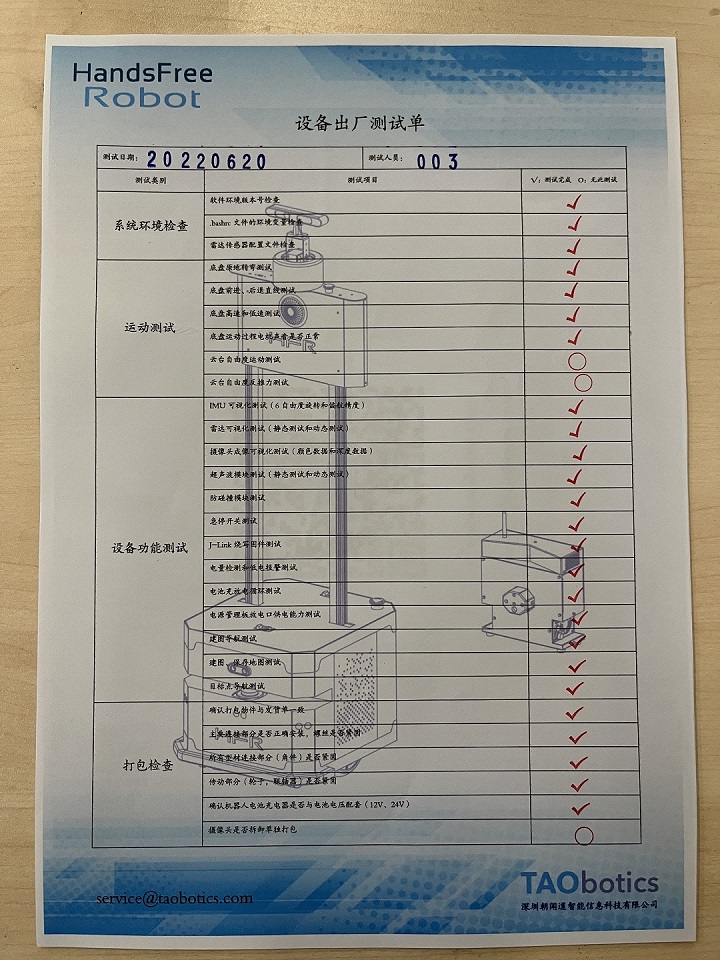 |
x1 |
| 10 | Equipment Certificate |  |
x1 |
3 Product Overview
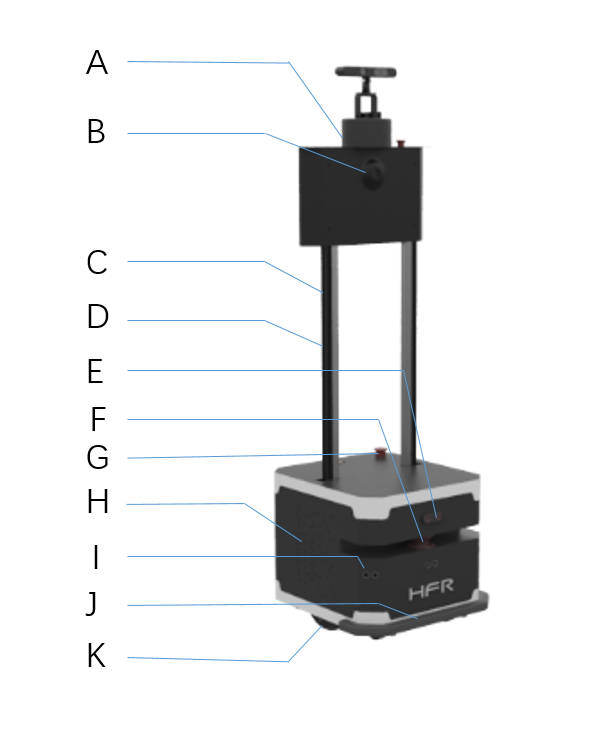
3.1 The Basic
| No. | Description |
|---|---|
| A | 2DOF gimbal |
| B | Microphone Array |
| C | High-strength struts |
| D | 70KG large load capacity |
| E | Binocular Camera |
| F | High-precision LiDAR |
| G | Main Power Switch |
| H | Host cooling system |
| I | Multiple Ultrasonic Sensors |
| J | Anti-collision sensor |
| K | 6.5 inch hub motor |
| No. | Description |
|---|---|
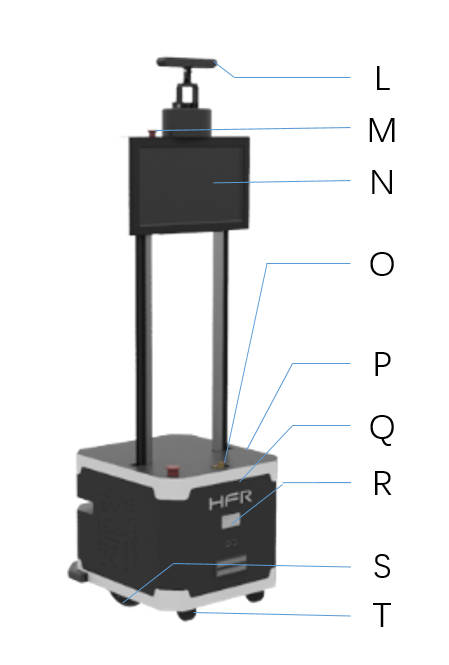
| L | Depth Camera |
| M | Emergency Brake Switch |
| N | 15.6 inch IPS HD monitor |
| O | Secondary development interface Multiple power output |
| P | Pro Robot Controller |
| Q | Discrete Graphics Host (Machine Learning) |
| R | LCD battery indicator |
| S | Independent Suspension |
| T | Four large load-bearing wheels |
3.3 Status indication
Users can identify the status of robot through the voltmeter, the buzzer and lights mounted on Giraffe.
| Status | Description |
|---|---|
| Current voltage | The current battery voltage can be read from the voltmeter on the rear electrical interface and with an accuracy of 0.1V |
| Low voltage alarm | When the battery power is lower than 15% or the voltage is lower than 22V, the car body will emit a harsh sound of "beep-beep-beep" as warning. When it is detected that the battery power is lower than 10% or the voltage is lower than 21V, in order to prevent battery damage, Giraffe will actively cut off the external expansion power supply and driver power supply. At this time, the chassis will not be able to perform motion control and accept external command control |
| Power on | TWhen powered on, the buzzer will make a "beep" sound, and the power display module and the screen will light up |
3.2 PS3 controller tutorial
The PS3 handle remote control is an accessory of Giraffe products. Using the PS3 handle can easily control the Giraffe robot. In this product, we use the left-hand throttle design. The functions of the buttons are defined as: the left joystick controls the movement of the chassis, and the right joystick controls the movement of the top servo.
Tutorial:
- Before starting the PS3 controller remote control, you need to insert the receiver into Giraffe's USB port
- Make sure the chassis emergency stop switch is turned on, the emergency stop switch pops up to control mode, press it to enter safe mode
- Press and hold Lai Shida's logo button to power on
- Giraffe runs the chassis driver and the ps3 handle driver (HandsFree WiKi tutorial PS3 control chapter)
- The left joystick controls the movement of the chassis, and the right joystick controls the movement of the top servo
3.3 Safety Information
3.3.1 Environment Considerations
- For the first use,please read this manual carefully to understand the basic operating content and operating specification.
- Use Giraffe always under -20℃~45℃ ambient temperature.
- If Giraffe is not configured with separate custom IPprotection, its water and dust protection will be IP22 ONLY.
- Make sure that each device has sufficient power.
- Make sure Giraffe does not have any obvious defects.
- Check if the remote controller battery has sufficient power.
3.3.2 Check
- Please charge in time when the device is low battery alarm.
- When Giraffe has a defect, please immediately stop using it to avoid secondary damage.
- When device has had a defect, please contact the relevant technical to deal with it, do not handle the defect by yourself.
3.3.3 Operation
- When using, make sure the emergency stop switch has been released.
- In remote control operation, make sure the area around is relatively spacious.
- Carry out remote control within the range of visibility.
- The maximum load of Giraffe is 20kg, when in use, make sure the payload does not exceed 20kg.
- When installing an external extension on Giraffe, confirm the position of the center of mass of the extension and make sure it is at the center of rotation.
3.3.4 Charging
- Giraffe products are equipped with a charger by default, which can meet the charging needs of customers;
- We recommend that you turn the robot off before charging. And there is no indicator light provided on the site while charging. For specific indicator lights, please refer to the description on the charger.
- Make sure that the Giraffe chassis is in a power-off state;
- Please make sure the main switch is off before charging;
- When charging, make sure the ambient temperature is greater than 0°C;
- Insert the plug of the charger into the charging port of the chassis;
- Connect the charger to power supply and turn on the switch in the charger. Then, the robot enters the charging state;
3.3.5 Maintenance
- According to the IP protection level of the device,please use Giraffe in the environment with the protection level requires for the equipment.
4 Performance parameters
| Projects | Indicators |
|---|---|
| Net Weight | 38kg |
| Dimensions | 399x411x1502mm |
| Load | 65Kg |
| Maximum speed | 1.2m/s |
| Endurance time | 10-15h |
| Steering | Two-wheel differential drive, active wheel with independent suspension |
| Obstacle crossing ability | 15mm |
| Power Expansion | 19V/3A x 1, 24V/30A x 2, 12V/3A x 2, USB 5V/2A x 2, one emergency stop 24V/30A |
| Internal Sensors | Integrated Encoder, Gyroscope, Magnetometer, Barometer, Expandable Ultrasonic/Infrared Sensor |
| Supported Devices | Rplidar A1/A2/A3, Hokuyo LiDAR, Xtion1/2, Raspberry Pi, IPC, Dobot Arm 1/2, Lightweight 6-axis Robot Arm |
5 Main Components
5.1 Camera Specifications
| Camera | Item | Parameter |
|---|---|---|
| Depth | 3D Technology | ORBBEC Monocular Structured Light |
| Working Range | 0.6-8cm | |
| Accuracy | 1m | |
| Field of View (FOV) | H 58.4° x V 45.7° | |
| Resolution@Frame Rate | 1280x1024@7fps 640x480@30fps 320x240@30fps 160x120@30fps |
|
| Deep processing chip | MX400 | |
| Proximity protection | Support | |
| RGB | Field of View | H 66.10° x V 40.2° |
| Working Range | 1280x1024@7fps 640x480@30fps 320x240@30fps |
|
| UVC | Support | |
| Others | Supported Operating Systems | Android/Linux/Windows |
| Work Environment | Indoor | |
| Data Interface | USB2.0 | |
| Dimensions | 164.85x48.25x40(mm) | |
| Microphone | Binaural Stereo | |
| Power consumption | <2.5W | |
| Working temperature | 10°C~40°C | |
| Rating | Class 1 Laser | |
| USB long cable | 1.5M |
5.2 Lidar (A3)
5.2.1 Performance parameters
| Project | Parameter |
|---|---|
| Measuring distance | 25m |
| Sampling frequency | 16KHz |
| scanning frequency | 10KHz |
| Angular resolution | 0.225° |
| Communication Interface | TTL UART |
| communication rate | 256000bps |
5.2.2 Communication Interface
| Color | Signal name | Type | Discription | Minimum | Typical value | Maxmum |
|---|---|---|---|---|---|---|
| red | VCC | power | total power supply | 4.9V | 5V | 5.5V |
| yellow | TX | out | Ranging core serial output | 0V | 3.3V | 3.5V |
| green | RX | in | Ranging core serial input | 0V | 3.3V | 3.5V |
| black | GND | power | ground wire | 0V | 0V | 0V |
| blue | MOTOCTL | in | Scan motor enable/PWM control | 0V | 3.3V | 5V |
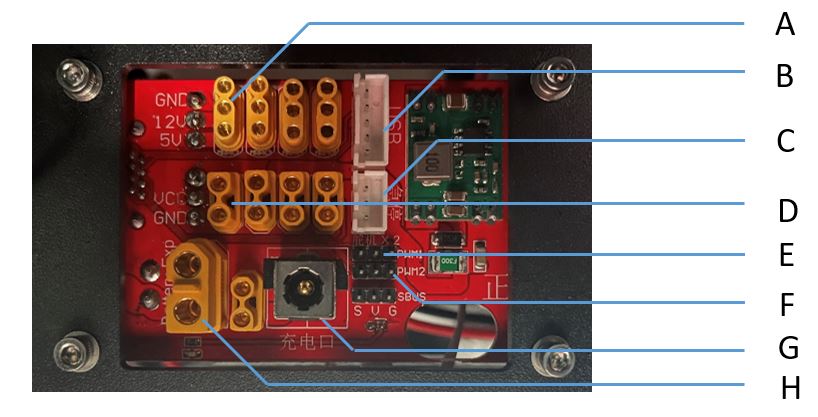
6 Expansion Board
On the robot, We also provide users with power extension interfaces for expanded applications. The details are as follows:
| No. | Type | Description |
|---|---|---|
| A | MR30 Female | 5V/12V |
| B | USB communication interface | |
| C | Emergency stop switch interface | Emergency stop switch |
| D | XT30 Female | Power Supply |
| E | Gimbal pick | |
| F | Gimbal Yaw | |
| G | DC5525 | Charging port |
| H | XT60 Female | 24V |
7 Q&A
Q: Giraffe is started up correctly, but why cannot the RC transmitter control the robot body to move?
A: First, check whether the E-stop switches are released; then, check whether the controlmode selected with the top left mode selection switch on the RC transmitter is correct.
Q: Giraffe gives "beep-beep-beep..." sound while running, how to deal with this problem?
A: If Giraffe give this "beep-beep-beep" sound continuously, it means the battery is in the alarm voltage state. Please charge the battery in time.
Q: Why is the Giraffe on but the screen remains black?
A: The shaking during transportation may cause the signal cable to become loose. We recommend that you try pluging the cable back in.