Cutebot User Manual

1 Product Introduction
Cutebot is an open source robot platform for scientific research, education and personal development. It is exquisitely designed and cost-effective. Cutebot adopts large-sized wheels and four-wheel differential motion mechanism, which has strong passability , can shuttle freely in various scenes. The fuselage integrates more than 10 sensors such as lidar, depth camera, ultrasonic array, microphone, and monocular, provides NVIDIA's rich computing resources. It provides a rich ROS software package and simulation environment for beginner developers, and users can easily develop functions such as robot systems, positioning and navigation, voice vision, and machine learning.
2 Shipping List
The Cutebot shipping list is shown below.
| No. | Name | Picture | Quantity |
|---|---|---|---|
| 1 | Cutebot Robot |  |
x1 |
| 2 | Battery Charger (12.6V/4A) |  |
x1 |
| 3 | Tools Set |  |
x1 |
| 4 | Equipment Warranty robotd / Service Manual |  |
x1 |
| 5 | Equipment Factory Test Sheet |  |
x1 |
| 6 | Equipment Certificate |  |
x1 |
3 Product Introduction
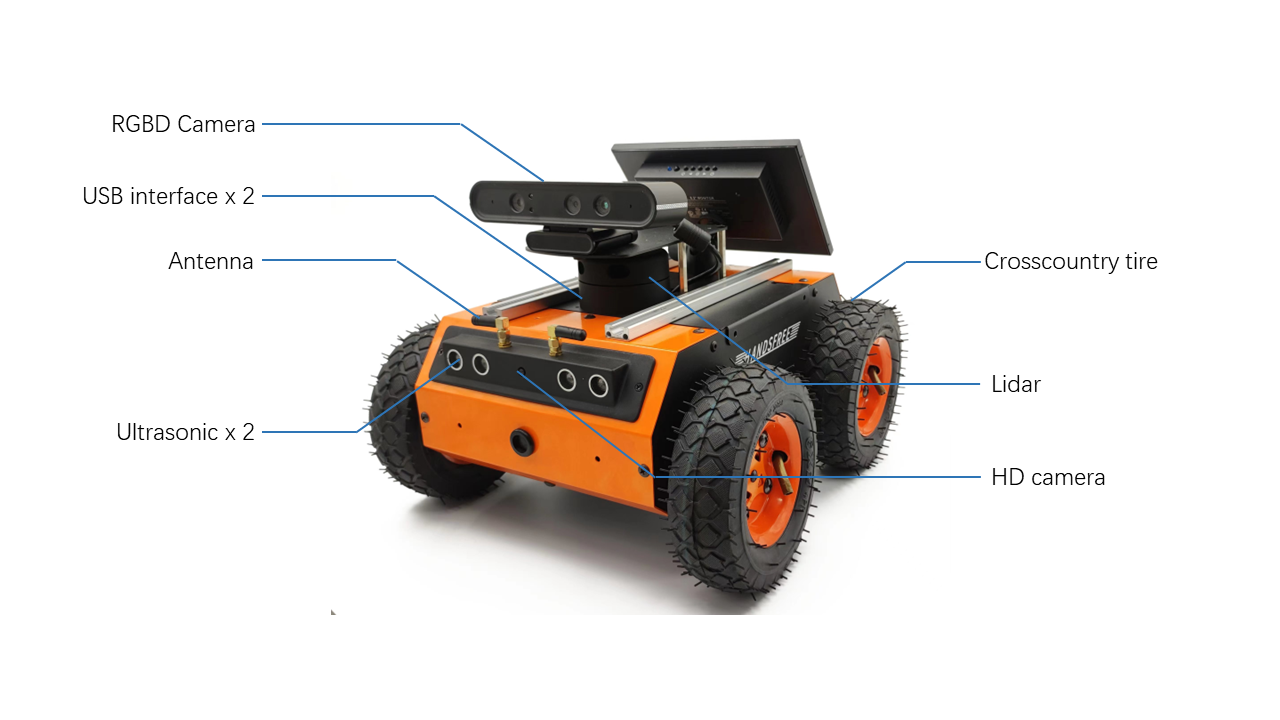
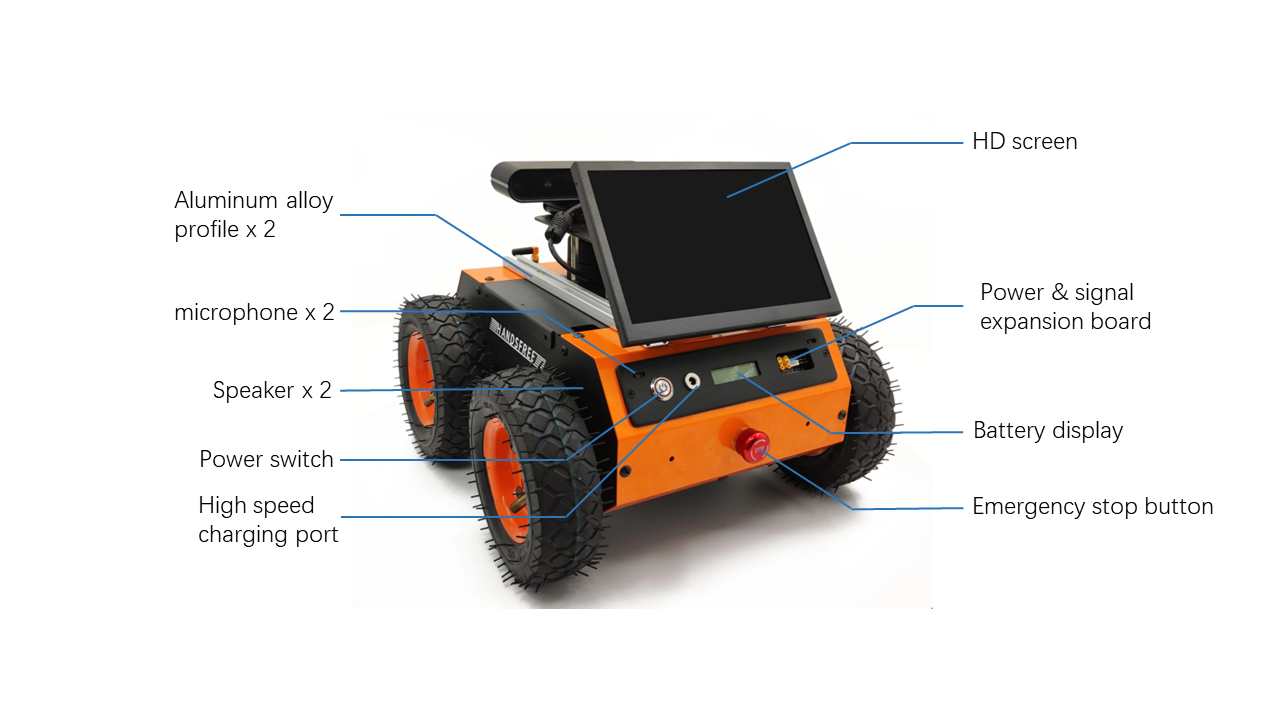
3.1 Vehicle Introduction
3.2 Status Indication
Users can confirm the status of the robot body through the battery display, buzzer and lights installed on Cutebot.
| Status | Description |
|---|---|
| Current Voltage | Current battery voltage can be viewed through the battery display screen in the back panel, accurate to 0.1V |
| Low voltage alarm | When the battery voltage is lower than 10V, the robot body will emit a harsh sound of "di-di-di" to prompt. |
| Power on | When powered on, the buzzer will make a "di~" sound, and the power display module and the screen will light up |
3.3 Notes
3.3.1 Environment
- When using for the first time, please read this manual robotefully to understand the basic operation content and operation specifications.
- Use in an ambient temperature of -20℃~45℃.
- If the vehicle is not individually customized IP protection level, the vehicle's water and dust resistance is IP22.
- Make sure the device has sufficient power.
- Make sure there is no obvious abnormality in the vehicle.
3.3.2 Inspection
- Please charge in time when the device is low battery alarm.
- When the equipment is abnormal, please stop using it immediately to avoid secondary damage.
- When the equipment is abnormal, please contact the relevant technical personnel to deal with it, and do not deal with it without authorization.
3.3.3 Operation
- Ensure that the surrounding area is relatively empty during control.
- Control within sight distance.
- The maximum load of Cutebot is 10 kg.
- When Cutebot installs an external extension, confirm the position of the center of mass of the extension and make sure it is in the center of rotation.
3.3.4 Charging
- Cutebot are equipped with a 5V/4A charger by default, which can meet the charging needs of users;
- Please turn off the battery to charge. When charging normally, there is no indicator light on the chassis. Please refer to the charger light for specific indicator lights, red means charging, green means fully charged;
- Please make sure the Cutebot chassis is powered off when charging, and make sure the tail switch is off.
- When charging, make sure the ambient temperature is greater than 0°C;
- Insert the plug of the charger into the charging port at the rear of the robot;
- When the charger is connected to the power supply, it can enter the charging state;
3.3.5 Maintenance
- Please use it in an environment that meets the requirements of the protection level according to the IP protection level of the device;
- Do not push the vehicle directly after the vehicle is turned on, this behavior will damage the motor or wheel and other structures;
3.3.6 Preparation before use
For safety during transportation, this product is shipped without a screen installed. After receiving the robot, the user should refer to the following to install the screen.
Cutebot's accessories include a screen power cable and an HDMI cable.
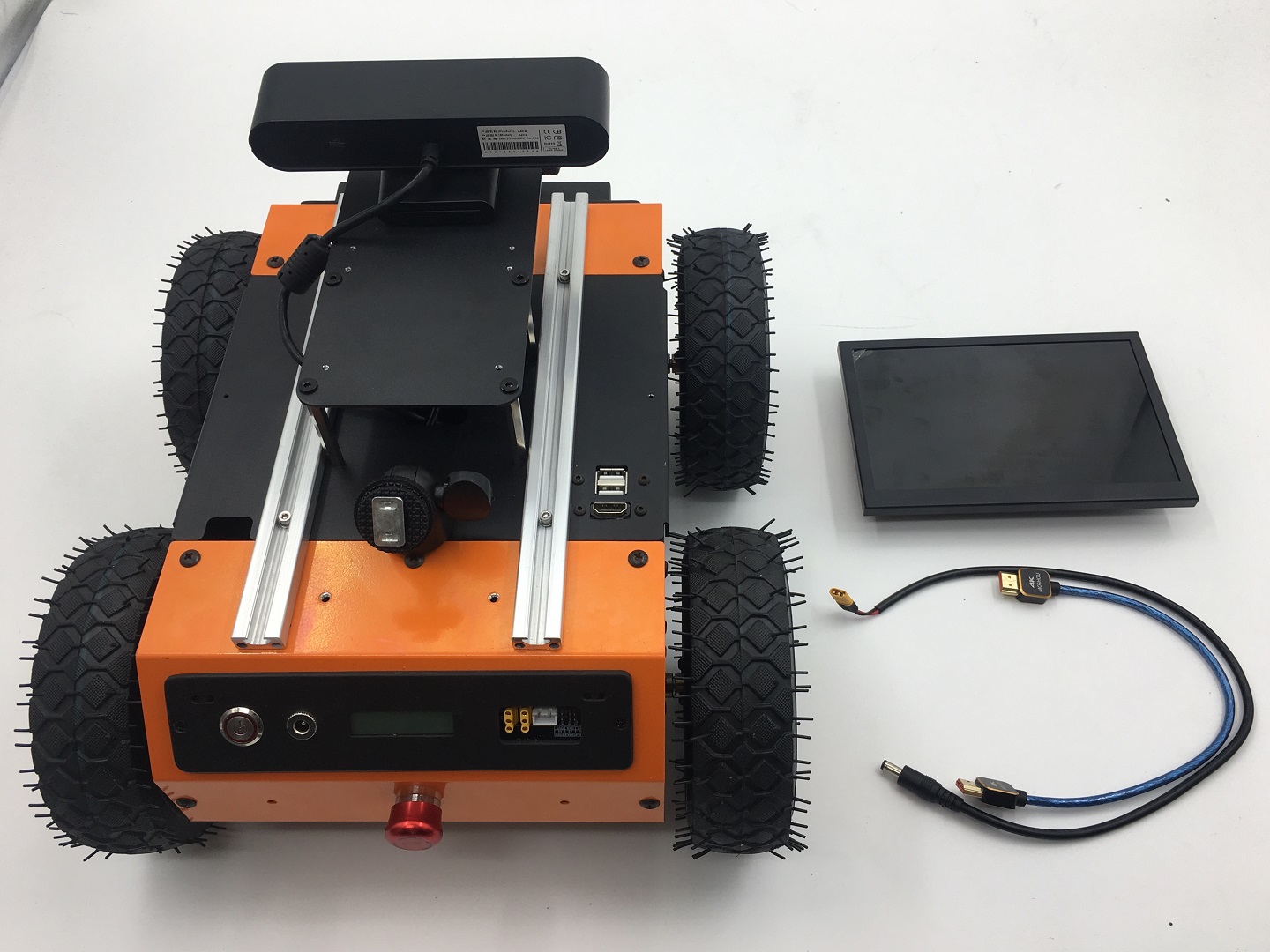
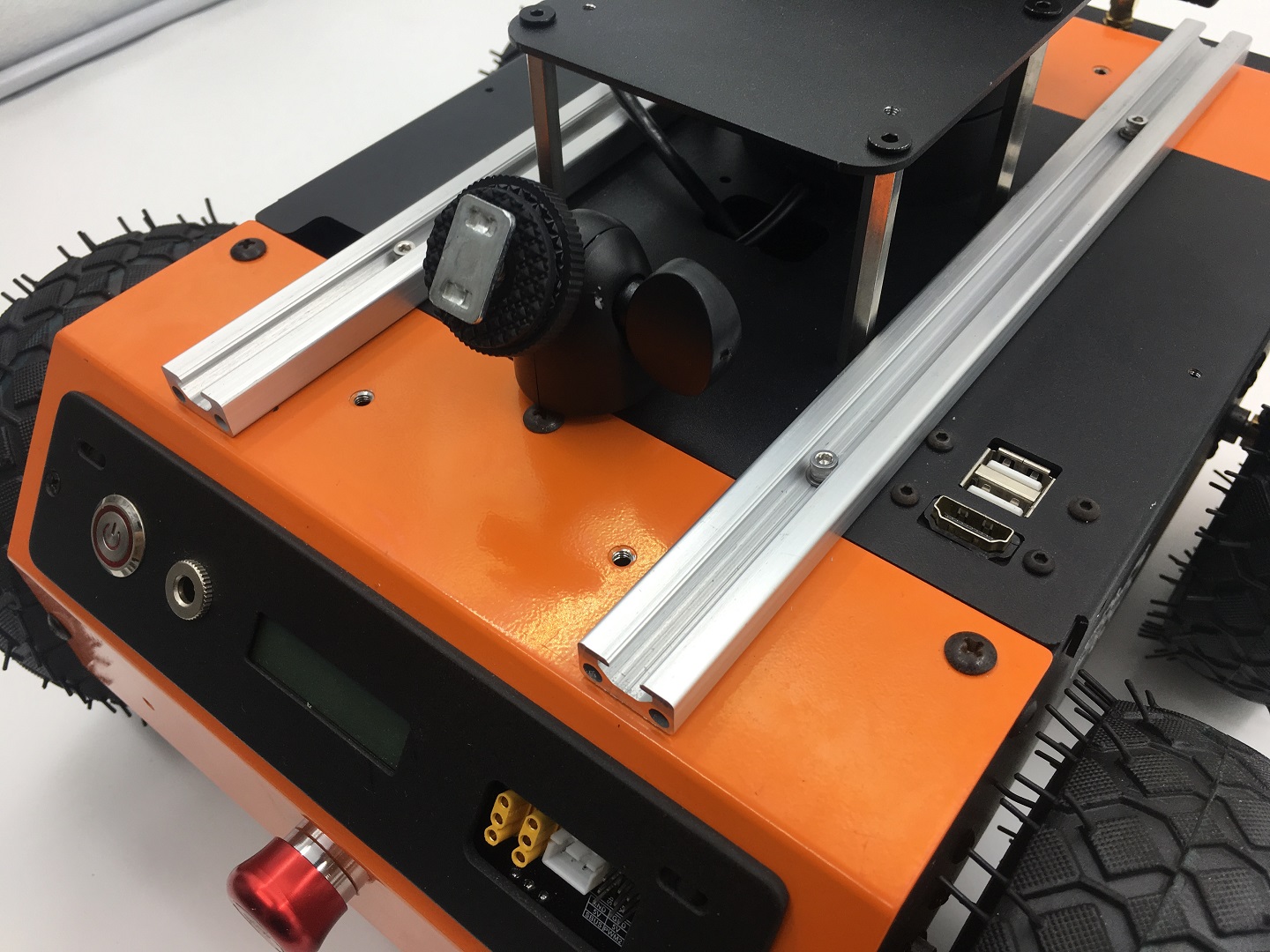
The user needs to hang the screen on the small iron piece in the picture below. Before hanging it, you can connect the power supply cable and HDMI cable of the screen (you can also connect the screen after installing the screen, the operation is relatively complicated)
The effect of hanging the screen is as follows

Turn the latch clockwise to secure the screen

Refer to the following method to connect the screen power cable and HDMI cable

Users can adjust the screen angle by themselves through the knob.

4 Function parameters
| Parameter Type | Item | Indicator |
|---|---|---|
| Hardware Parameters | Dimensions (mm) | 373 x 326 x 273 |
| Chassis height (mm) | 57 | |
| Driven mode | 4 Wheel Differential | |
| Self-weight (kg) | 7.7kg | |
| Maximum load | 10kg | |
| Maximum speed | 1.2m/s | |
| Maximum climbing angle | 25° | |
| Battery | 9800mAh 12V | |
| Power Extension | 12V x 2, 5V x 2 | |
| Working hours | 3h | |
| Standby time | 6h | |
| System Parameters | Industrial PC | NVIDIA Jetson Nano(4GB) |
| CPU | Quad-core ARM A57 @1.43GHz | |
| GPU | 128-core Maxwell | |
| System | Ubuntu 18.04LTS | |
| ROS version | ROS Melodic | |
| Communication interface | USB, WiFi, HDMI, CAN, Sbus | |
| Speaker | 2x3W High Power Speaker | |
| Display | 7 inch 1280 x 800 screen | |
| Sensors | 6-axis IMU | MPU6050 |
| Motor encoder | 4 | |
| Ultrasonic | 2 ultrasonics, Maximum detection distance 450mm | |
| Lidar | Maximum detection distance 16m | |
| HD camera | 1 camera, 120 degrees without distortion, 8 million pixels | |
| RGDB camera | RGB: 1920x1080@30fps; Depth: 640x400@30fps |
|
| Voice module | 2 microphones, Snowboy Voice Assistant Supported |
5 Main Components
5.1 Host Parameters
| Projects | Metrics |
|---|---|
| CPU | Ouad-Core ARMCortex-A57 MPCore |
| Frequency | 64bitSoca1.43GHz |
| GPU | 128-core NVIDIAMaxwellTM GPU |
| AI Performance | 473 GFLOPS |
| Memory | 4GB 64-bit(LPDDR425.6GB/s) |
| Wifi | 2.4G,5G |
| Bluetooth | Yes |
| Network | Gigabit Ethernet (RJ45) |
| POE Powered | Yes |
| Rated Power | 5W-10W |
| Display | HDM1DisplayPort |
| Camera | CSI |
| IO | 40pin |
| USB | 4 x USB 3.0 |
5.2 RGBD camera parameters
| Item | Parameter |
|---|---|
| Depth Range | 0.6m—8m |
| Depth Map Resolution | 1280 x 1024@7fps 640 x 480@30fps 320 x 240@30fps 160 x 120@30fps |
| Color Image Resolution | 1280 x 720@30fps 640 x 480@30fps 320 x 240@30fps |
| Depth FOV | H 67.9°, V 45.3° |
| Color FOV | H 71°, V43.7° @1920 x 1080 |
| Data Interface | USB2.0 |
| Supported Operating Systems | Android/Linux/Windows |
| Working temperature | 10℃ ~ 40℃ |
| Applicable scene | Indoor |
| Safety | Class1 Laser |
| Dimension(mm) | 164.9 x 48.3 x 40 |
5.3 Radar Parameters
| Item | Min | Typ | Max | Units | Remarks |
|---|---|---|---|---|---|
| Ranging frequency | / | 10000 | / | Hz | / |
| Scan Frequency | 5 | 7 | 12 | Hz | / |
| Ranging Range | 0.12 | / | 16 | m | 80% Reflectivity |
| Scan Angle | / | 0-360 | / | ° | / |
| Absolute Error | / | 2 | / | cm | Range≤1m |
| Relative Error | / | 2.0% | / | / | 1m<Range≤8m |
| Angular resolution | 0.18@5Hz | 0.25@7Hz | 0.43@12Hz | ° | / |
5.4 Ultrasonic parameters
| Item | Parameter |
|---|---|
| Detection Distance | 2-200cm |
| Detection Accuracy | 0.5cm |
| Detection Frequency | 20Hz |
| communication interface | TTL serial port |
| Output method | USB output |
5.5 Wireless network robotd parameters
| Item | Parameter |
|---|---|
| NIC chip | Intel 8265AC |
| Wireless Band | 2.4GHz/5GHz |
| Wireless Rate | 300Mbps/867Mbps |
| WiFi Protocol | 802.11ac |
| Bluetooth Version | 4.2 |
6 Expansion Board
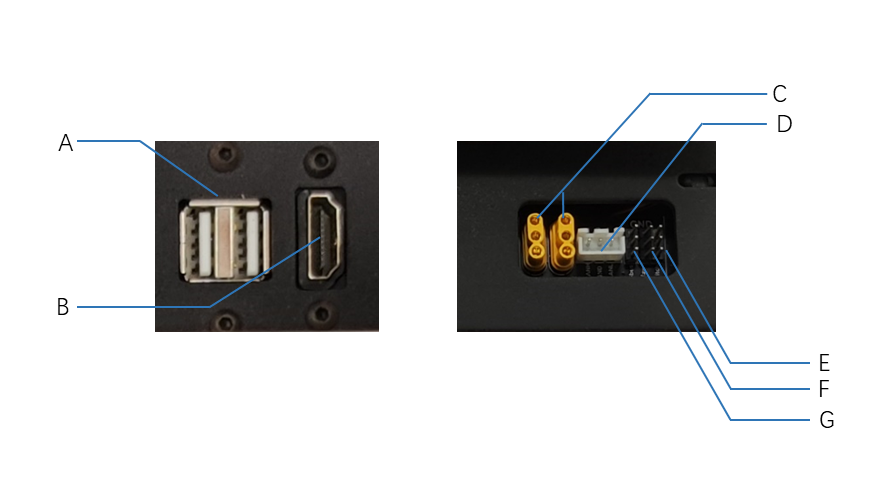
There are power supply and signal expansion interface for users to use for secondary development behind Cutebot. The details are as follows.
| Serial number | Name | Description |
|---|---|---|
| A | USB expansion port x 2 | USB 2.0 |
| B | HDMI signal expansion interface | HDMI signal expansion interface |
| C | MR30 power expansion interface x 2 | The lower hole is GND, and a 12V current is formed between it and the middle hole, and a 5V current is formed between it and the upper hole |
| D | CAN bus expansion interface | CANH, GND and CANL from left to right |
| E | 2 axis head signal extension | Pitch Signal Extension |
| F | 2 axis head signal extension | Yaw Signal Extension |
| G | Sbus signal expansion interface | Sbus remote control signal expansion interface |
7 Common problems and solutions
Q: After the Cutebot is powered on, the host turns on and the screen does not light
A:
Reason analysis: The long-term movement of the robot causes the power supply cable or HDMI cable of the screen to become loose, resulting in the screen not displaying content normally.
Solution: Check whether the connection of the two wires is tight, if there is looseness, reconnect it.