Gemini-O 用户手册

1 产品简介
Gemini-O是一款面向 科研教育、个人开发的开源机器人平台,精巧设计,高性价比。Gemini-O基于三轮全向型运动机构,集成了激光雷达、深度相机、超声波阵列、麦克风阵列、高清摄像头阵列等10多个传感器,并提供了NVIDIA丰富的算力资源。为初学开发者提供了丰富的ROS/ROS2软件包和仿真环境,用户可以轻松开发机器人系统、定位导航、语音视觉、机器学习、多机编队等功能。
2 发货清单
Gemini-O 出货单清单如下。
| 序号 | 名称 | 图片 | 数量 |
|---|---|---|---|
| 1 | Gemini-O 机器人本体 |  |
x1 |
| 2 | 电池充电器(12.6V/4A) |  |
x1 |
| 3 | 工具套装 |  |
x1 |
| 4 | 设备保修卡 / 服务手册 |  |
x1 |
| 5 | 设备出厂测试单 | 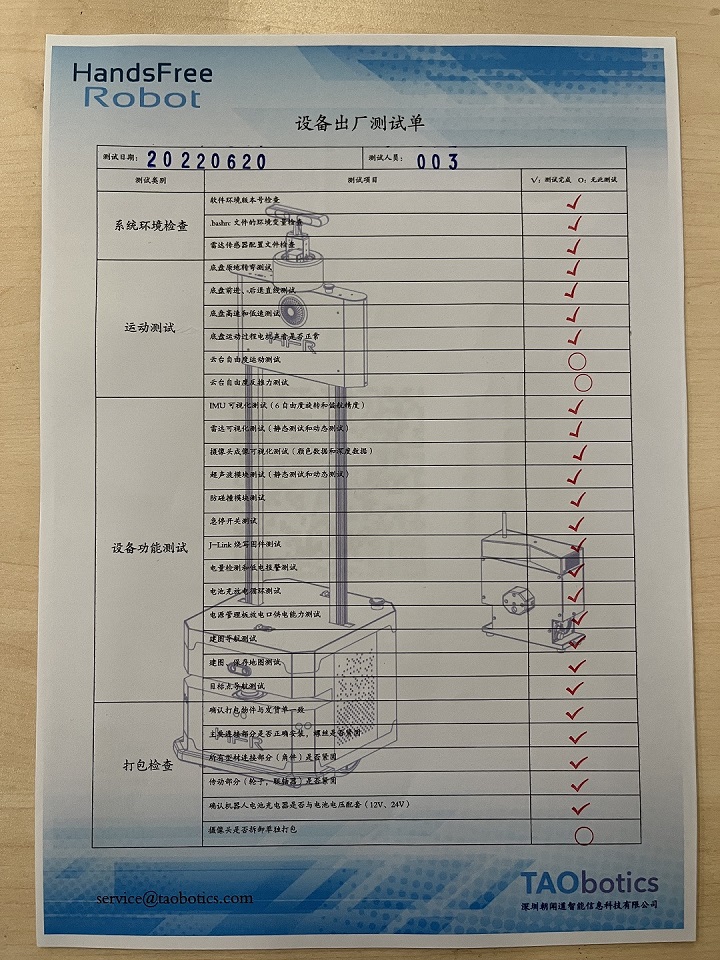 |
x1 |
| 6 | 设备合格证 |  |
x1 |
3 产品介绍
3.1 整车介绍

| 序号 | 说明 |
|---|---|
| A | RGBD 相机 |
| B | 超声波 x 2 |
| C | RGBD摄像头 x 1 |
| D | 六轴IMU |
| E | RGB灯条 x 2 |
| F | 高清摄像头 x 2 |
| G | 激光雷达 |
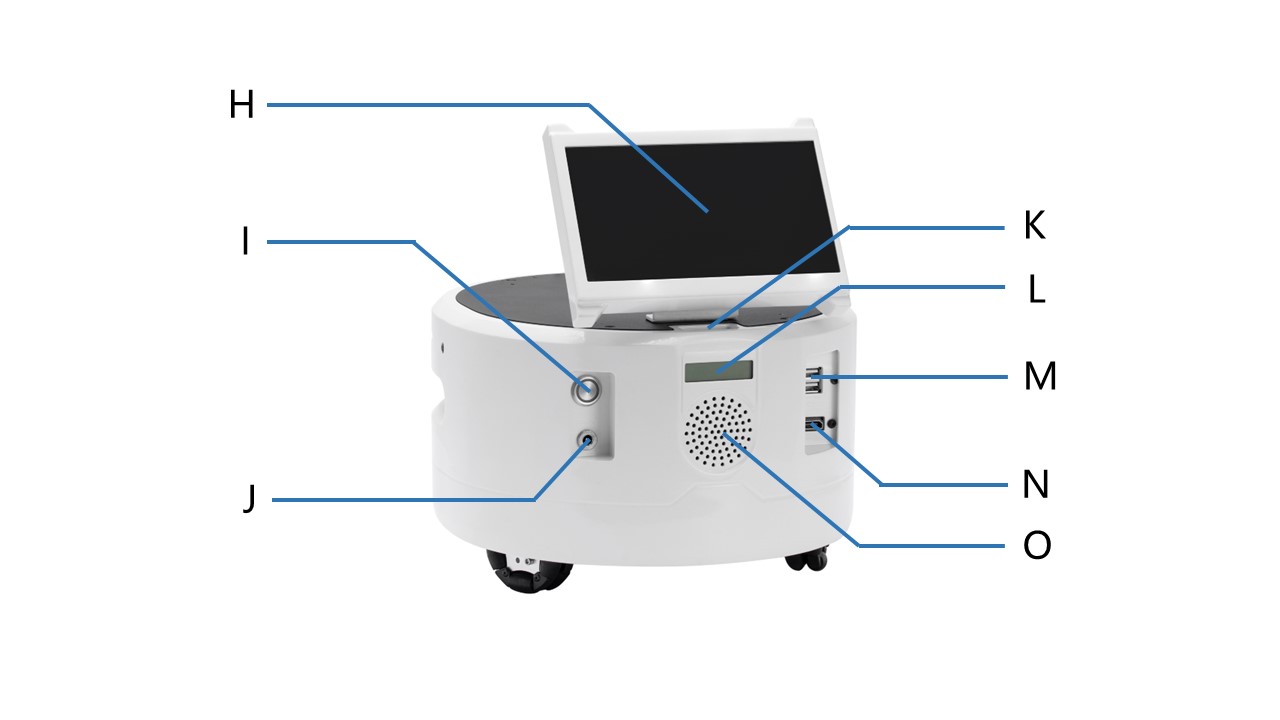
| 序号 | 说明 |
|---|---|
| H | 7英寸触摸屏 |
| I | 电源开关 |
| J | 高速充电头 |
| K | 电源&信号扩展 |
| L | 电压显示屏 |
| M | USB 扩展接口 x 2 |
| N | HDMI 接口 |
| O | 大功率扬声器 |
3.2 状态指示
用户可以通过安装在 Gemini-O 上的电量显示屏、蜂鸣器以及灯光来确定车体的状态。
| 状态 | 描述 |
|---|---|
| 当前电压 | 当前电池电压可通过背面板中的电量显示屏幕查看,精确到0.1V |
| 低电压报警 | 当电池电压低于10V时,车体会发出“滴-滴-滴”刺耳的声音进行提示。 |
| 上电 | 上电时,蜂鸣器会发出"滴~"的声音, 且电量显示模块以及屏幕会亮起 |
3.3 注意事项
3.3.1 环境
- 首次使用,请先仔细阅读本手册,了解基本操作内容与操作规范。
- 在-20℃~45℃的环境温度中使用。
- 如果车辆非单独定制 IP 防护等级,车辆防水、防尘能力为 IP22。
- 确保设备的电量充足。
- 确保车辆无明显异常。
3.3.2 检查
- 当设备低电量报警时请及时充电。
- 当设备出现异常时,请立即停止使用,避免造成二次伤害。
- 当设备已经有出现异常时,请联系相关技术人员处理,切勿擅自处理。
3.3.3 操作
- 保证控制时周围区域相对空旷。
- 在视距内控制。
- Gemini-O 最大的载重为 20 KG。
- Gemini-O 安装外部扩展时,确认扩展的质心位置,确保在旋转中心。
3.3.4 充电
- Gemini-O 产品默认配备一个5V/4A的充电器,可满足用户的充电需求;
- 请关机充电,正常充电时,底盘没有指示灯说明。具体指示灯请看充电器上说明;
- 充电时请确保 Gemini-O 底盘处于停机断电状态,请确认尾部开关处于关闭状态。
- 充电时,确保周围环境温度大于 0℃;
- 将充电器的插头插入车尾的充电口中;
- 充电器连接电源,即可进入充电状态;
3.3.5 保养
- 请根据设备的 IP 防护等级在满足防护等级要求的环境中使用;
- 车辆开机以后请勿直接推动车辆,该行为会损伤电机或车轮等结构;
3.3.6 使用前的准备
为了运输过程中的安全,本产品在发货时没有安装屏幕,用户在收到无人车以后,在使用之前,需参考下文内容安装屏幕。
Gemini-O 的配件中包含了安装屏幕的螺丝以及扳手

用户可选择对应型号的扳手将螺丝拧到安装屏幕的孔位中,安装完成后如下图所示。

之后用户需要连接屏幕的供电线和 HDMI 线,供电线和HDMI线如下图所示

用户可参考下图中的方式连接这两条线,屏幕上具有一个HDMI接口以及两个 Micro b 接口,这两个 Micro b 接口中,如果连接上边的接口,则可以启用屏幕的触摸功能,用户可根据自己的需求选择具体使用哪个接口。

4 功能参数
| 参数类型 | 项目 | 指标 |
|---|---|---|
| 硬件参数 | 外形尺寸 | 280mm x 260mm x 170mm |
| 底盘高度 | 17mm | |
| 驱动方式 | 三轮全向 | |
| 自重 | 4Kg | |
| 最大负载 | 10kg | |
| 最大速度 | 1m/s | |
| 最大爬坡角度 | 15° | |
| 电池 | 9800mAh 12V | |
| 电源接口 | DC(5.5 x 2.5mm) | |
| 电源扩展 | 12V 5A x 2、5V 2A x 2 | |
| 工作时间 | 3h | |
| 待机时间 | 6h | |
| 指示灯 | RGB灯条 x 2 | |
| 系统参数 | 工控机 | NVIDIA Jetson Nano(4G) |
| CPU | Quad-core ARM A57@1.43GHz | |
| GPU | 128-core Maxwell | |
| 系统 | Ubuntu18.04LTS | |
| ROS版本 | ROS Melodic | |
| 通讯接口 | USB、WiFi、HDMI、CAN、Sbus | |
| 扬声器 | 3W大功率扬声器 | |
| 显示器 | 7英寸 1024 x 600 触摸屏 | |
| 传感器 | 6轴IMU | MPU6050 |
| 电机编码器 | 3个 | |
| 超声波 | 2个超声波,检测距离 450 cm | |
| 激光雷达 | 最大16m,10000Hz测量频率 | |
| 高清摄像头 | 2个高清摄像头,120度无畸变,800万像素 | |
| RGBD相机 | RGB:1920 x 1080@30fps; Depth:640 x 400@30fps; |
|
| 语音模块 | 2个麦克风,支持Snowboy Voice Assistant/Google Assistant |
5 主要零部件
5.1 主机参数
| 项目 | 指标 |
|---|---|
| CPU | Ouad-Core ARMCortex-A57 MPCore |
| 主频 | 64bitSoca1.43GHz |
| GPU | 128-core NVIDIAMaxwellTM GPU |
| AI性能 | 473 GFLOPS |
| 内存 | 4GB 64-bit(LPDDR425.6GB/s) |
| WiFi | 2.4G,5G |
| 蓝牙 | 有 |
| 网络 | 千兆以太网(RJ45) |
| POE供电 | 有 |
| 额定功率 | 5W-10W |
| 显示 | HDM1DisplayPort |
| 摄像头 | CSI |
| IO | 40pin |
| USB | 4xUSB 3.0 |
5.2 RGBD摄像头参数
| 项目 | 参数 |
|---|---|
| Baseline | 40mm |
| 深度范围 | 0.3m—3m |
| 功耗 | 整机工作平均功耗<2W,激光开启瞬间峰值 <5W(持续时间 3ms),待机功耗典型值为<0.7W |
| 深度图分辨率 | 640 x 400@30FPS 320 x 200@30FPS |
| 彩色图分辨率 | 1920 x 1080@30FPS 1280 x 720@30FPS 640 x 480@30FPS |
| 精度 | TBD |
| 深度 FOV | H 67.9° , V 45.3° |
| 彩色 FOV | H 71° ,V43.7° @1920 x 1080 |
| 延迟 | 30-45ms |
| 数据传输 | USB2.0 或以上 |
| 支持操作系统 | Android / Linux / Windows7/10 |
| 供电方式 | USB |
| 工作温度 | 10℃ ~ 40℃ |
| 适用场景 | 室内 |
| 防尘防水 | 基础防尘 |
| 安全性 | Class1 激光 |
| 尺寸(毫米) | 59.6 x 17.4 x 11.1mm |
5.3 雷达参数
| 项目 | 最小值 | 典型值 | 最大值 | 单位 | 备注 |
|---|---|---|---|---|---|
| 测距频率 | / | 10000 | / | Hz | / |
| 扫描频率 | 5 | 7 | 12 | Hz | / |
| 测距范围 | 0.12 | / | 16 | m | 80%反射率 |
| 扫描角度 | / | 0-360 | / | ° | / |
| 绝对误差 | / | 2 | / | cm | 测距≤1m |
| 相对误差 | / | 2.0% | / | / | 1m<测距≤8m |
| 角度分辨率 | 0.18@5Hz | 0.25@7Hz | 0.43@12Hz | ° | / |
5.4 超声波参数
| 项目 | 参数 |
|---|---|
| 探测距离 | 2-450cm |
| 探测精度 | 1cm |
| 探测频率 | 20Hz |
| 通信接口 | TTL串口 |
| 输出方式 | USB输出 |
5.5 无线网卡参数
| 项目 | 参数 |
|---|---|
| 网卡芯片 | Intel 8265AC |
| 无线频段 | 2.4GHz / 5GHz |
| 无线速率 | 300Mbps / 867Mbps |
| WiFi协议 | 802.11ac |
| 蓝牙版本 | 4.2 |
6 扩展板
在无人车上面我们留有供用户二次开发使用的电源扩展口,详细介绍如下:
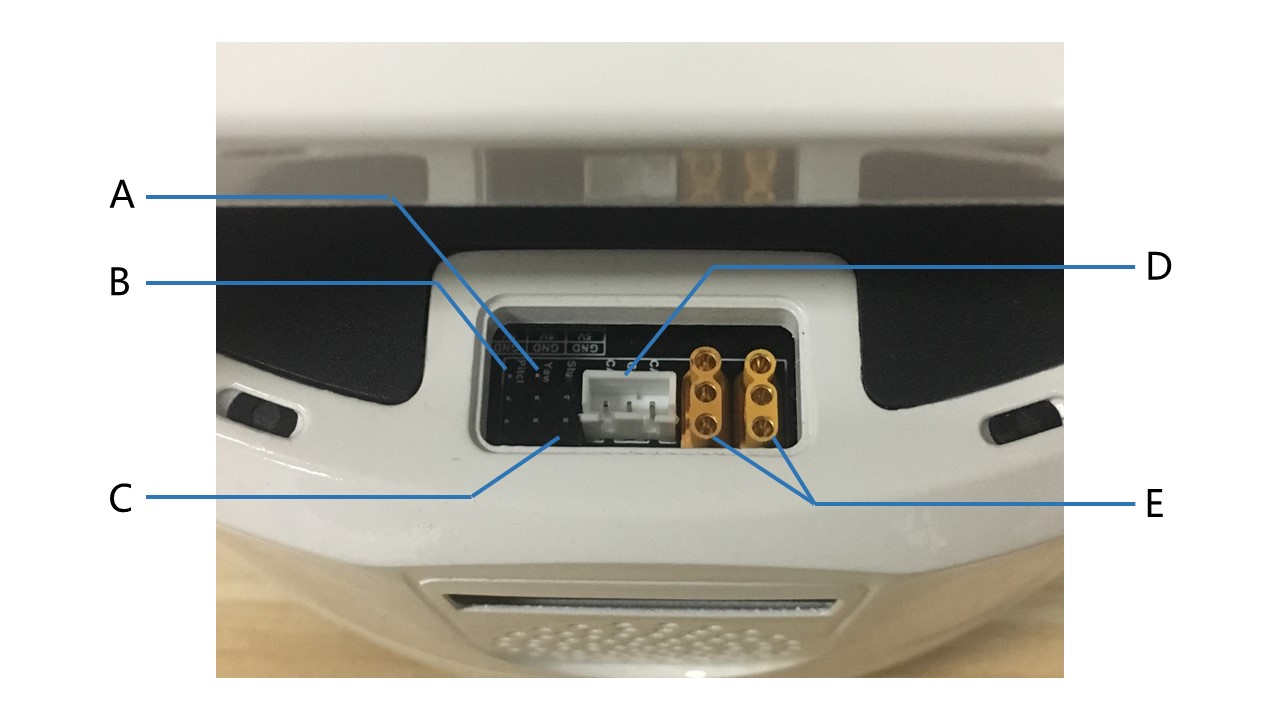
| 序号 | 描述 |
|---|---|
| A | 云台Yaw信号扩展接口 |
| B | 云台Pitch信号扩展接口 |
| C | 无人车Sbus信号扩展接口 |
| D | CAN总线信号扩展接口,从左到右依次为CANL、GND以及CANH |
| E | MR30接口 x 2,从上到下依次为GND、5V、12V |
7 常见问题与解决
Q:Gemini-O 上电后主机开机了屏幕不亮
A:
原因分析:无人车长时间的运动导致屏幕的供电线或者HDMI线松动,导致屏幕无法正常显示内容。
解决方案:检查这两根线的连接是否紧固,如果存在松动的状况,则重新连接即可。
Q:Gemini-O 的运动表现不正常,如使用键盘遥控直线行走的时候,左偏或右偏严重,而里程计中显示一切正常,或者导航程序无法正常执行等
A:
原因分析:由于无人车长时间运动导致车轮松动
解决方案:用户可检查轮胎的紧固螺丝是否松动,如若松动则使用工具紧固螺丝。此外,由于Gemini-O 采用了全向轮设计,较普通无人车而言,在运动的时候更自由,可以向任意方向移动,但是也失去了部分精度,导致其运动精度方面的表现相较其他无人车而言会差一点,这也是全向轮本身的一种特性。